


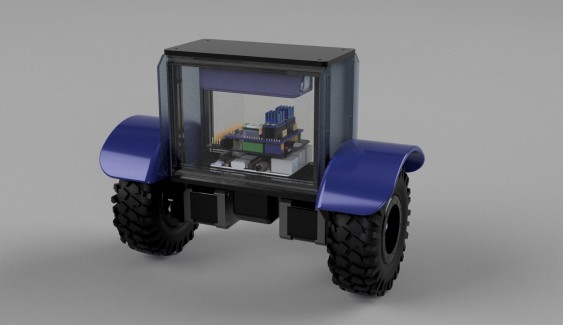
Self balancing rover robot
Have started a project where the goal is to create a slef balancing rover robot
120mm wheels
Nema 17 stepper motors
6050 gyro
Raspberry PI 3B+
PI Cam
Arduino Leonardo PI Cape
Stepper Drivers
Sharp IR Range Sensor
3S LiPo battery
3D printed body parts (designed in Fusion 360)
I`ll spend time designing the body parts while waiting for the electronics..
This project is based on "Learning by doing" lika many og my other projects :-)