


Sebastian
This is Sebastian (A.K.A. "Sebbie"), a little palm-sized robot I built as a present for my partner since I figured it was about time I built something for her =)
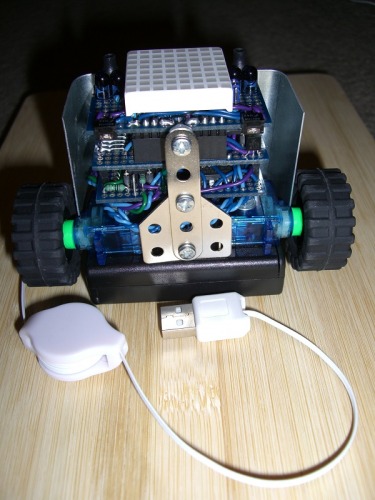
Sebastian wanders around on smooth desktops, floors, etc, using his two QRD1114 IR reflectance sensors to avoid going off any edges or steep inclines. The DIY IR sensor pairs on the front left and right are used for obstacle avoidance, but they're over-sensitive so Sebastian is often blinded until he's right up against the object anyway. Two hacked (continuous rotation) micro servos are used to move Sebastian around in combination with the small skid under his front. Sebastian's centre of gravity is only slightly forward of his wheels, so his front will often tip up a little when he goes from forward to reverse suddenly.
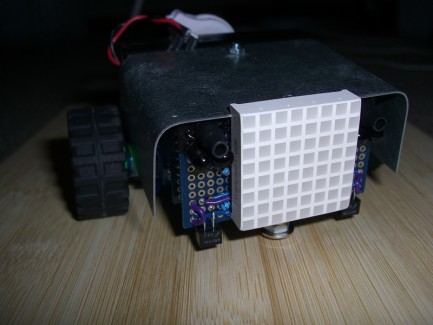
The orange 8x8 LED matrix on the front serves as Sebastian's face, and is used to display what task he's currently performing. There's a small piezo speaker behind the LED matrix, but the sound tends to get swamped out by the servos so I haven't really made use of it. The black battery box on the back contains 3 NiMH AA cells which power the whole system - these can be removed for charging as normal, or charged via the retractable USB cable. When the USB cable is plugged in, Sebastian's servos are disabled to prevent him from yanking the cable out accidentally. The USB cable reel has a little magnet glued to it which is paired with another magnet on the back of the battery box to keep it out of the way when Sebastian's not being charged.
Patrols desktop environments, has a habit of shoving things off the edges...
- Actuators / output devices: 2 x hacked micro servo, 8x8 LED Matrix Display
- Control method: autonomous
- CPU: 2 x 16LF628A
- Power source: 3 x AA NiMH, USB Charge/Run
- Programming language: Assembly
- Sensors / input devices: 2 x QRD1114, 2 x DIY IR reflectance sensors, USB Cable
- Target environment: desktop