



SEA RENDERING
This is Mark II of the Whirligig project https://www.robotshop.com/letsmakerobots/node/16995 code name SEA RENDERING (it’s not actually a code name, just an anagram for my name :-) )
The purpose of this robot is to have it log water depths along a predefined set of waypoints. It stores its data on memory sticks or on SD cards. The estimated runtime is about 24 hours and with a top speed of 3km/h it will travel roughly 72km. With a log entry for every 10m this would give us over 700 depth measurements with full GPS reference.
Most of the control system has been moved from the original Whirligig to save cost and time.
The hull was designed in the free version of DELFTship http://www.delftship.net/ and built this winter. With the split mould I can produce a second hull in matter of days.
The original plan was two hulls working in pairs as a catamaran with a solar panel on top. This can still be done but two robots working independently we can cover a larger lake on shorter time.
Some images from the hull build


Adding fiberglass to one half of the mould

Mould completed

The first casting

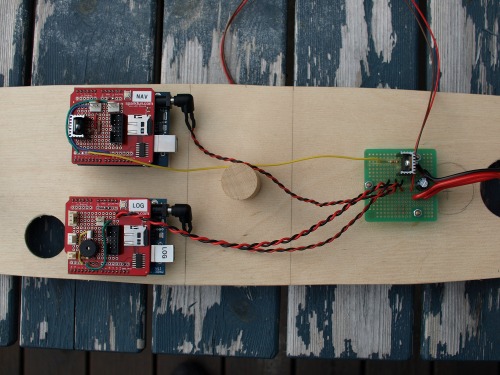
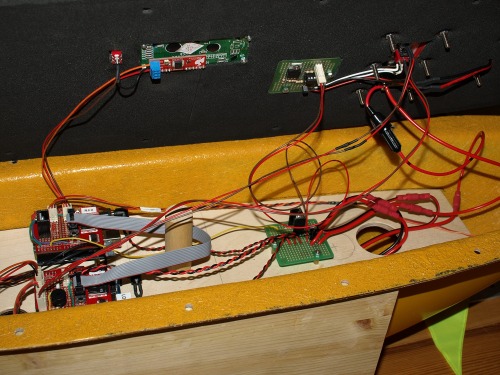
Here are some pictures from the complete robot

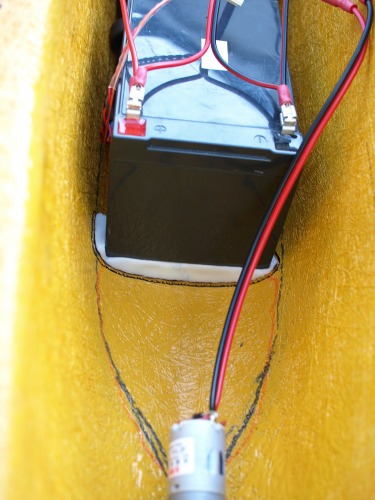
Transducer

Polymorph beddings for the batteries

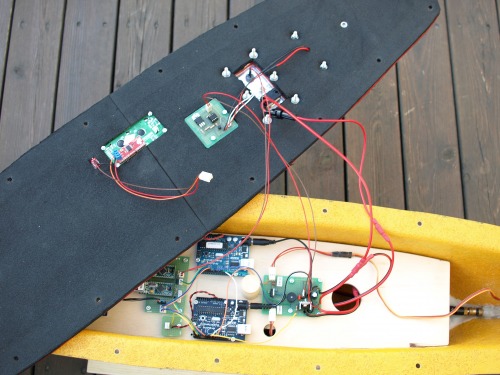
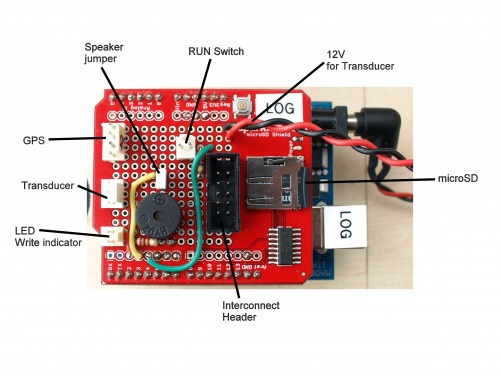
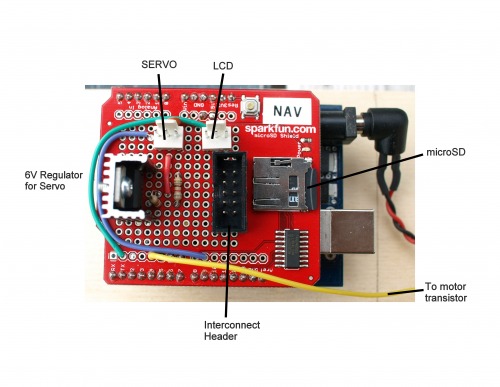
Control system

Some electronics in the lid
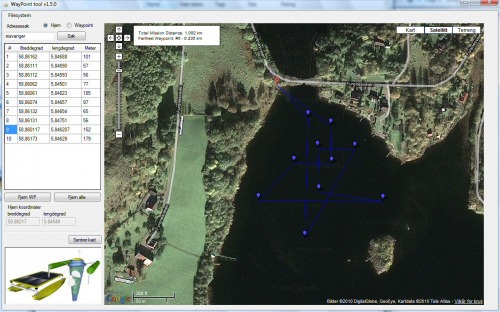
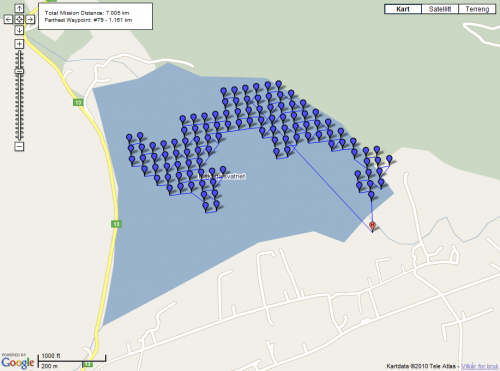
The waypoints are entered using my adaptation of the Ardupilot tool. A great application that lets you interactively add waypoints to your list. This list is then copied onto the SD card and the robot is ready to run.
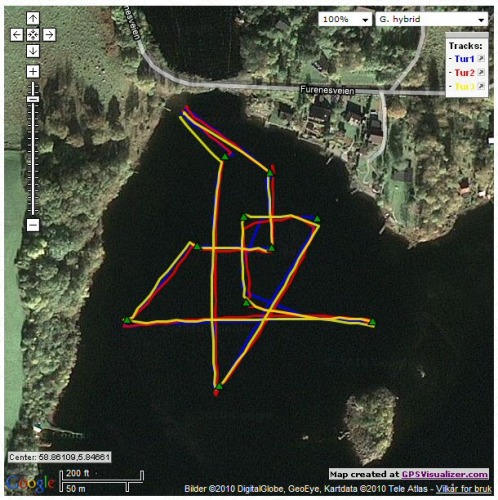
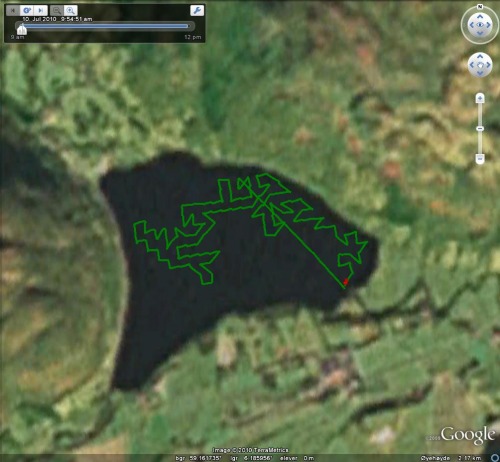
I run this routing 3 times and this is a GPS visualization of the log. The green markers are the waypoints.
(one of the log files are attached)
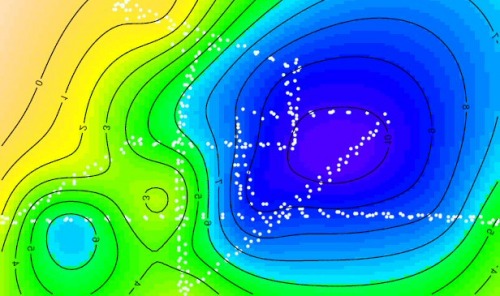
My brother (a professor at the University of Oslo) that will be using this robot, then run these 3 logs in something called "Thin plate spline" http://en.wikipedia.org/wiki/Thin_plate_spline to see if the depths we logged made sense. And this is what he came up with.
All in all this project seems very promising.
Update 28/6-2010
After having had some problems with the VDIP1 USB interface I decided to go for the microSD shield from Sprakfun http://www.sparkfun.com/commerce/product_info.php?products_id=9802 .
Now the whole thing looks much cleaner and is probably more robust.
Update 11/7-2010
This weekend my brother and I went to the lake ‘Riskedalsvatnet’ to do a full scale test. The full waypoint routing had 337 waypoints and a total length of 18,1km.

The traveling speed of the boat is about 3km/h so the mission should have been completed in about 6 hours. As this was the first full scale test and we had some uncertainties on where the shore line actually where, we decided to split the trip into 3.
This is the first segment of the mission.
This is how the boat run
And this is an Dr.Depth rendering of the depths we got.
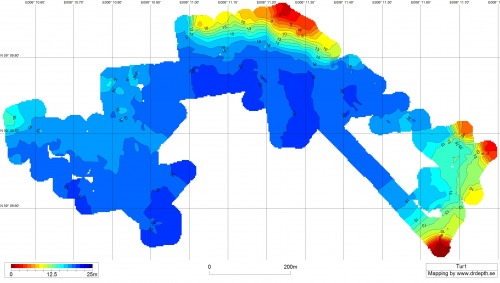

After all segments where completed this map was generated in Dr.Depth
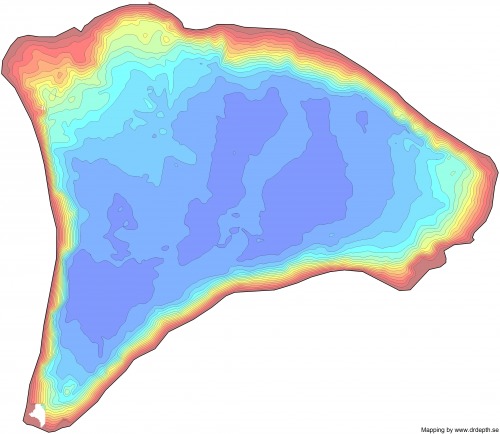
A full size map in b/w is attached
UPDATE 14/7-2010
Added the Arduino sketch if anyone want to have a look.
Measure water depths in lakes
- Actuators / output devices: 12V 1000 RPM motor, servo based rudder
- Control method: autonomous
- CPU: Aruino Duomilanove 328 x 2 and PICAXE
- Operating system: Arduino C++
- Power source: 2 each 12V 12Ah lead batteries
- Programming language: C++
- Sensors / input devices: GPS, digital trancduser
- Target environment: Lakes