



SCOUT+
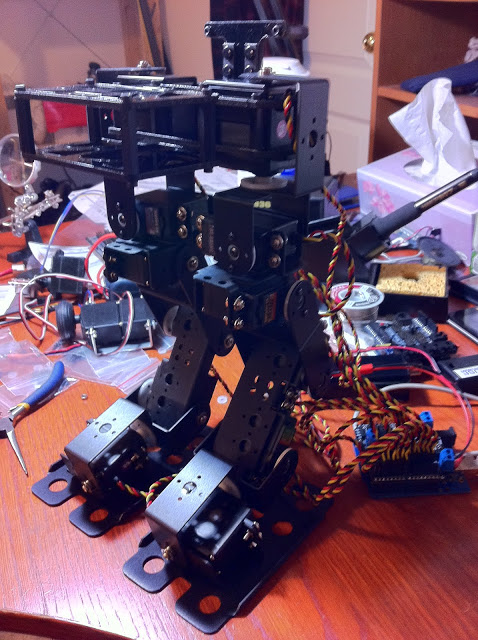
This is the basic from chassis from lynxmotion by using arduino and I/O shield to control 12 servos. So far was working fine but I want to make it a bit different than original design so I make 2 hands with 4 extra servos. This is where to problem begins. I change to arduino MEGA which should support more than 12 servos but it works very strange after I add #13 servo. Few servos stop working and few doesn't move as they suppose to. It's odd and I have been search all over the net with no luck. Some said it could be timer or some pins I shouldn't use, some said it could be the way I programmed and all other kinds of possibility for such failure. Since I only have this board which could go up to 12+ servos I am start thinking the board itself might have problem. I even tried the code that oddbot use for his test on SPIDER but it just not working properly in my MEGA board.
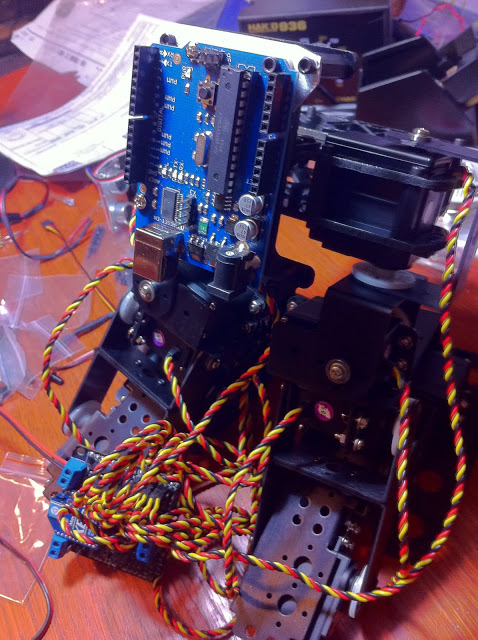
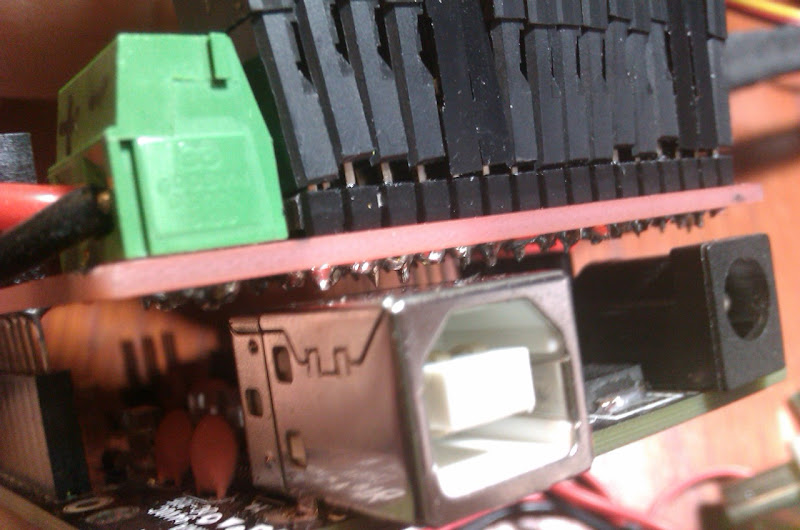
Then I remember I got a servo shield which support 16 servos. Yes, It finally works but it's a bit slow to do the moves. Not as smooth as when I coded in Arduino with 12 servos. Few bad thing about this board is the way it designed. The power connector just right about USB and it's easily causing the power short.
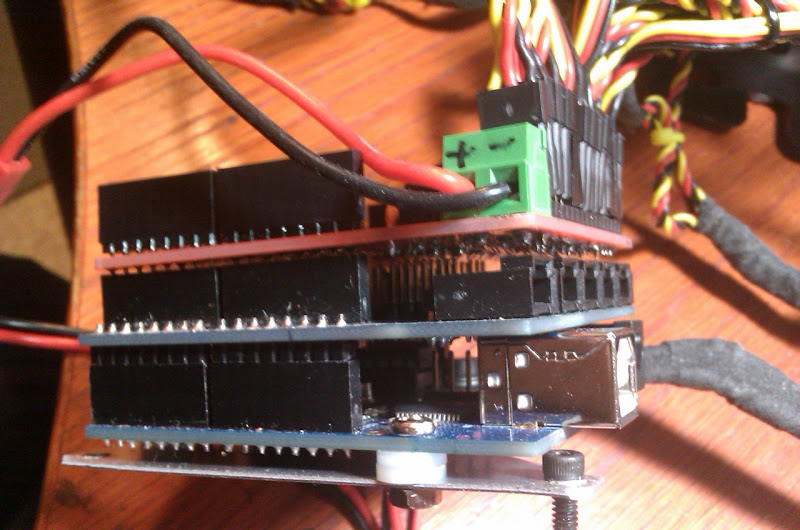
Therefor I add up another shield in between to create the space to prevent short problem.
It's very difficult to coding this biped robot with this servo shield and I was kinda frustrated so I just leave it in corner and play around it once a while until I saw Oddbot has great success on CHOPSTICKS I decide to try SPIDER board on my biped. Hope I can get better result from that~ Waiting for the parts now...
- CPU: ATmega1280 or ATmega2560
- Power source: 7.2V lipo with UBEC
- Programming language: Arduino