


ScannerTank
Basically this tank was gutted and is being rebuilt with sensors and a new brain. I've posted info on this tank and how cheap it was to aquire, so now this is going to be the actual project page.
I'm currently still working on the dual hbridge which will be controlled by two of the pwm's of the arduino. I'll be using a 14m and 8m for the sensors and communications array.
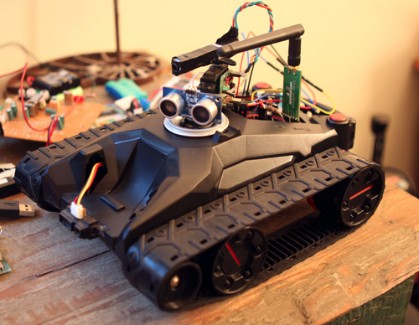
From the image I've posted, I have the gp2d10 up front for immediate front detection. This has been glue'd on. The ping senosr has also been mounted and this should be the final location. I have played around with different servo postions and will come up with a final location hopefully soon. There was a mic that used to be where the ping is but I removed that.The ir beacon sensor will be mounted right behind the ping sensor which it also happens to be the perfect height for the sensor and beacons. If I can get my hands on one for cheap, I'll be adding a wiimoteir sensor to assist in the locating of the ir beacons so that I can do a recode of my ir setup and also remove some unwanted issues that I currently have.
sits in one spot and does nothing for the moment
- Control method: autonomous with radio telemetry feedback currently using bluetooth
- CPU: Picaxe 14m, picaxe 08M, arduino 168
- Power source: 6 AA cells
- Programming language: wiring
- Sensors / input devices: ping sensor, ir detector, gp2d10, others in future
- Target environment: indoors, Outdoors, gravel terrain