



S.I.H.RO 1.0, now becoming 2.0 (Work in progress)
S.I.H.RO 1.0 (Socially Intelligent Humanoid Robot Version 1) is going to be an autonomous and learning humanoid robot that can interact with others surrounding it. The work is currently in progress with a friend of mine known as robotmaker10. So far, we have created a design of the head and body, and have currently been designing the process of how it will work for the past few months. Here are some photos of our progress.( Here was the first original design)




UPDATE 1: I have just recently spraypainted the waist and head part of S.I.H.RO with the same color prior to my schematic. I will be soon attaching the waist to the base in which a standard servo allows it to revolve from left to right. I will then add the eye mechanism for S.I.H.RO's head, and in addition a camera for its eye. Finally, I have been working with the seeed studio sd card shield for the arduino to create speech synthesis for it. I will be posting new pictures very soon. That's it for now, but I'll keep you posted.
UPDATE 2: My friend has decided he did not like my created 1st version of S.I.H.RO. SO after hours of sketching and putting the finishing touches on it, I give you S.I.H.RO 2.0!
UPDATE 3: I have currently made the body form schematics of S.I.H.RHO, and a small paper model to guide me through the process of building it. The paper model schematics will be shown too in addition.
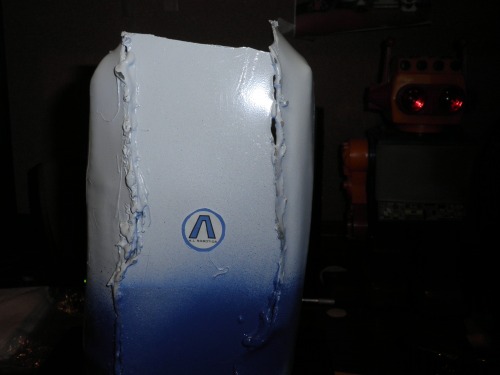
UPDATE 4: I have just ordered the parts for SIHRO, and I have created the body. Here is a picture of it!

UPDATE 5: I've finally decided SIHRO's source of microcontroller: the EZ- Board. Some people may not have heard about this nice little board in particular, but it will work excellently for my little personal robot. I will keep you updated.
UPDATE 6: It has been a while since I made another update, so here it is: I had vacuum formed my little companion's head a while ago, and buffed it up real nice. Just yesterday, I also picked up two 7- color blinking leds to light up its eyes. It is not completely done yet, but here is a picture of what the body and the head looks like together. Finally, I am really thinking about SIHRO being bipedal, as well.

My next creation's approach is to be a socially interactive humanoid robot. The work is currently in progress.
- Actuators / output devices: Parallax standard servos
- Control method: Full autonomous
- CPU: EZ-Board
- Operating system: Linux, Windows
- Power source: Unknown yet
- Programming language: Unknown yet
- Sensors / input devices: microphone, camera
- Target environment: Around other people