


Roz
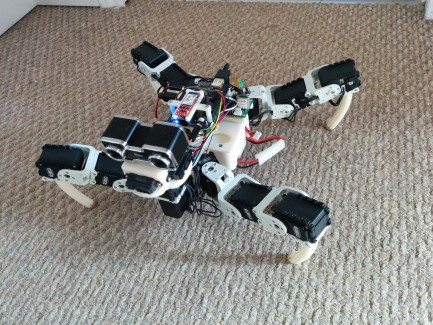
Roz is a Bioloid-based quad walker.
It has a BeagleBone Black linux single-board computer controlling it using Python. The Bioloid bus is connected to the BBB over USB using a custom bus board I designed. Roz uses three Sharp GP2D12 IR range sensors for obstacle detection. They are connected to the bus using a custom I/O board.
Roz uses a modified version of NUKE (ported to Python) for inverse kinematic based walking.