



RoverX mini
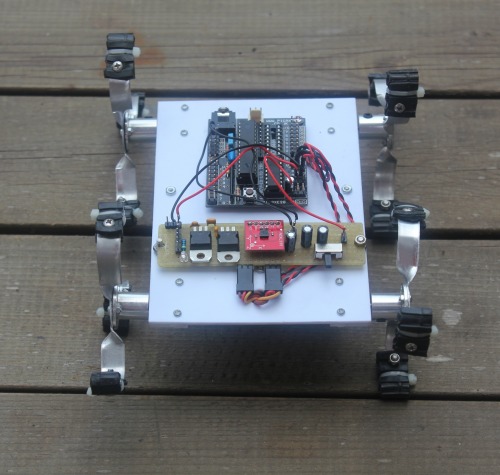
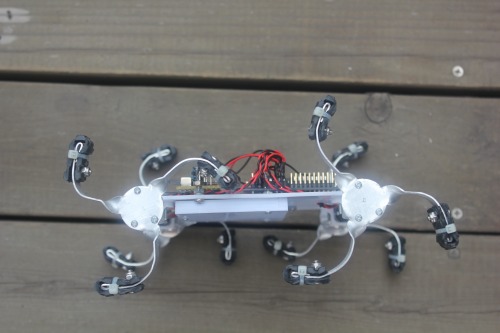
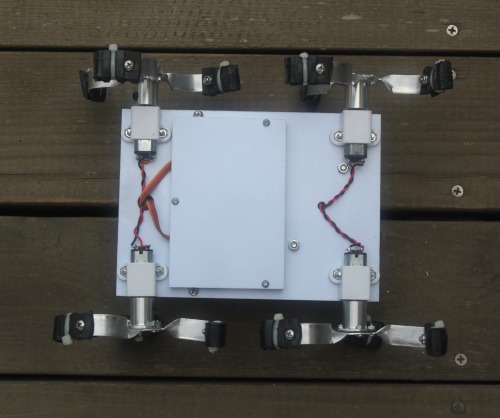
This is my attempt to build a very small and light but offroad vehicle. The accelerometer acts as a tilt sensor. A bandwidth of 1Hz has been set with according external capacitors to filter heavy vibrations, produced by the wheel legs. The bi-directional flexible bend sensors will be used as tactile sensors on the front and rear of the robot.The robot is powered by two 3.7V cell phone Li-Ion batteries (BT-33). A L7805 supplies 5V for the Picaxe, a LD33V 3.3V for the accelerometer. The main body and the battery compartment is made from 2mm ABS sheet. The wheels are made from 1.5mm aluminum sheet, rubber from an old tank track and 3mm wheel hubs.
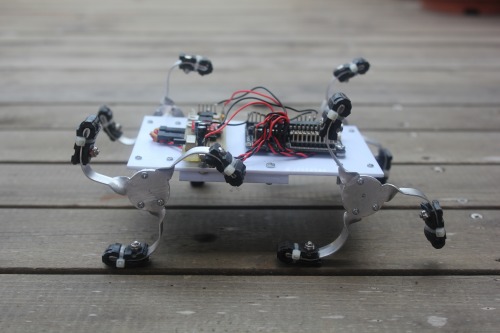
Travels on rough surface
- Actuators / output devices: 4 x 298:1 Mini metal gear motor
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 2 x cell phone battery BT-33, 3.7V/1000mAh
- Programming language: Basic
- Sensors / input devices: 3 axis accelerometer, bi-directional flexible bend sensor
- Target environment: outdoor