


RoverX - A lunar rover study
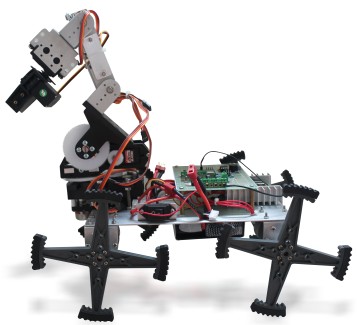
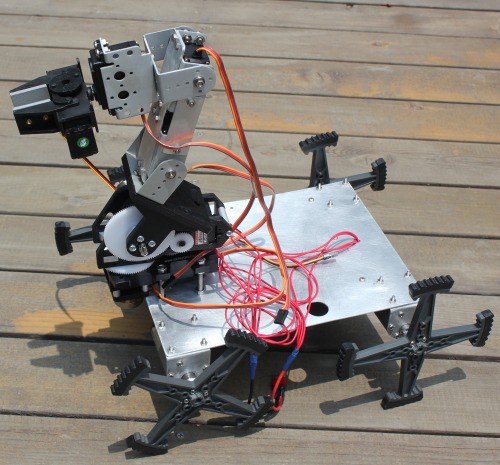
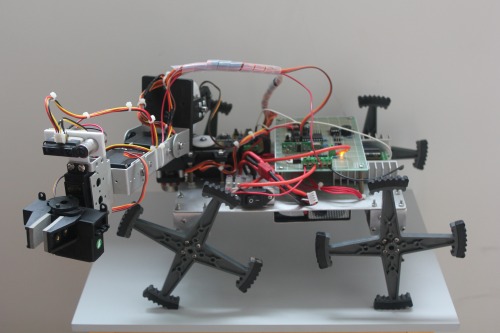
This is a lunar rover study I am doing for the Google Lunar X Prize. RoverX is a so called wheg robot. I was inspired by the work of the Case Biorobotics Lab. I started with some sketchup drafts before I built the robot, using 2mm and 1.5mm aluminum sheet.
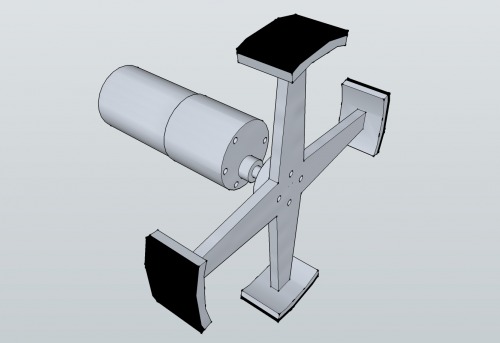
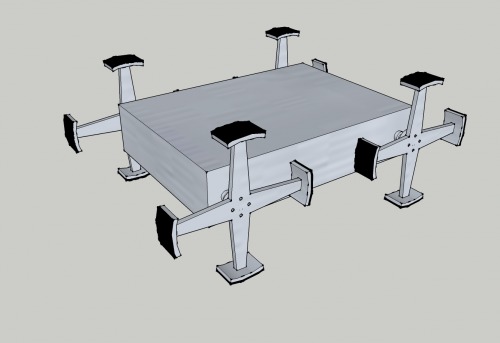
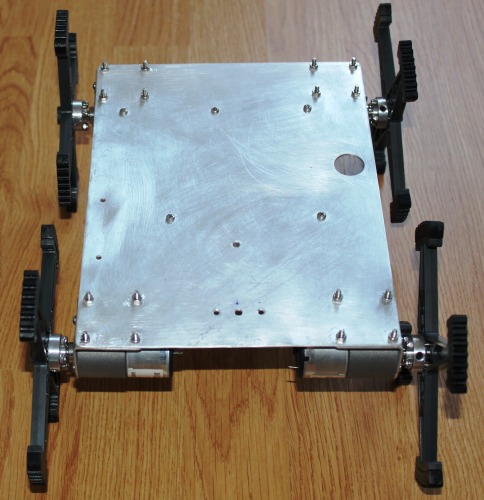
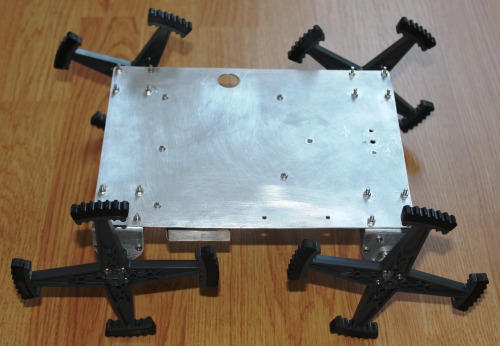
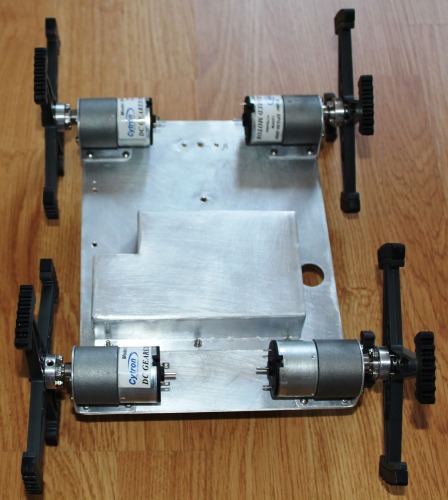
The wheel legs are from VEX. I've added 6mm wheel hubs to connect the wheels with the 4 gearde motors (cytron-12v-12rpm-166oz-in-spur-gearmotor).The motor driver is a Sabertooth 2x25, controlled by simplified serial.

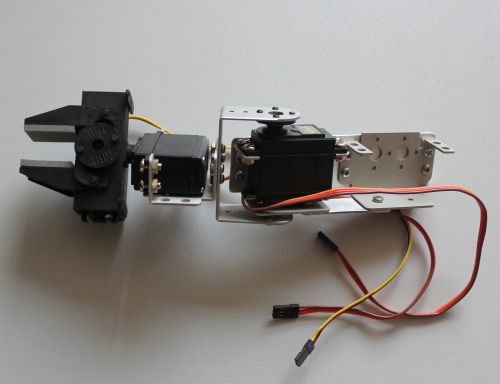
Arm under construction:


The main board and the robot arm control board:
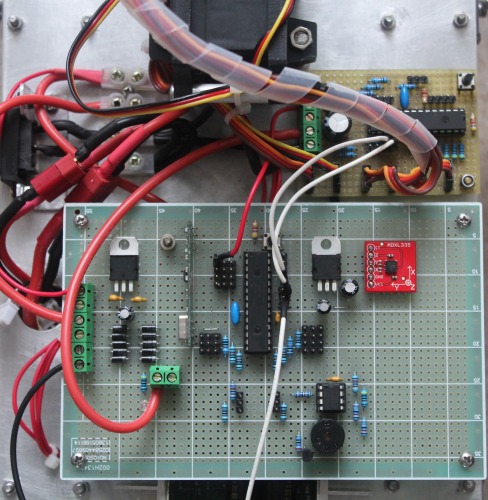
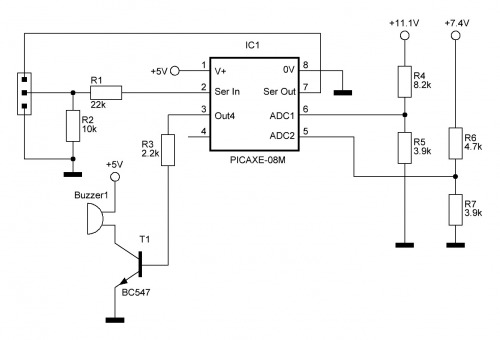
The PIC12F683 monitors the voltages of the two Li-Po batteries. If the voltages drop under a certain limit, a buzzer starts to sound:
Remote control, using cheap 433 MHz transmitter module:

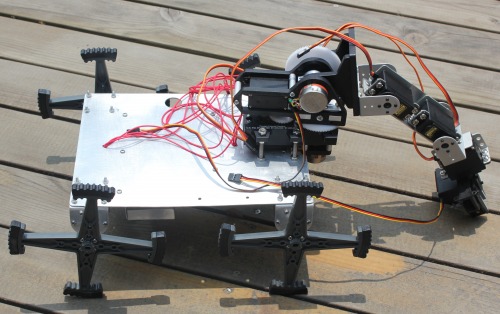
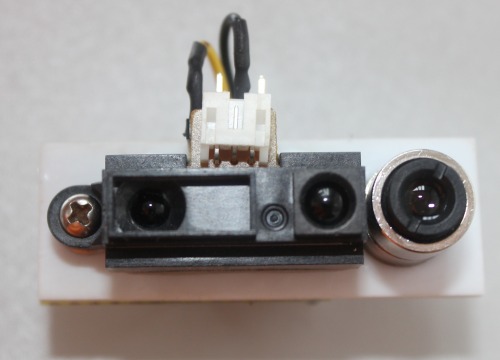
RoverX with LADAR:
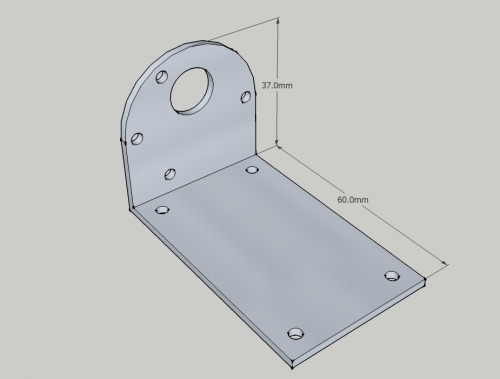
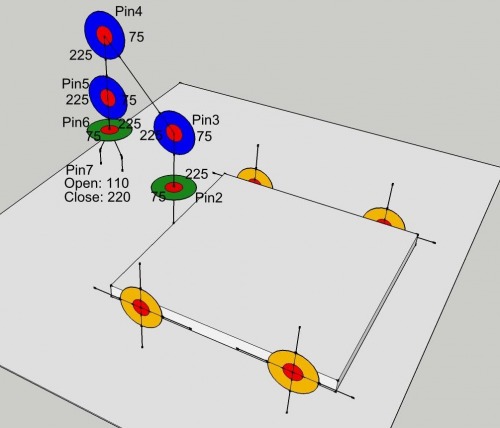
Useful sketch for programming the arm:
I have created a poll: Which Google Lunar X Prize team has the most sophisticated rover in the moment?
You're all roboteers, be honest, visit the team web sites, study the rover prototypes and vote then:)
Travels on the lunar surface
- Actuators / output devices: 4 geared motors, 6DOF robot arm
- Control method: autonomous or remote controlled
- CPU: 2 x PIC16F886, 1 x PIC12F683
- Power source: 1 x LiPo 11.1V, 2200mA, 1 x LiPo 7.4V, 4000mA
- Programming language: Basic
- Sensors / input devices: ADXL 335, LADAR
- Target environment: Lunar surface