


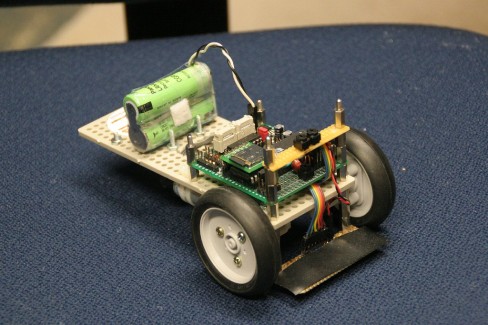
RoverX
This is a bot I built a few years ago when I wanted to start learning robotics.
Its based on the Atmel Mega644P MCU and has an dual H-Bridge driving two geared motors with Quadrature Encoders on them. I first wrote (ok found other examples on the web and then made them better) interrupt drivers to update two sined long integers holding the movements (forwards and back) at 564 ticks per 1 revolution of the motors (Faulhaber).
It also has an MicroSD card for recording the movements to fat32 file system for later playback.
It also uses a P.I.D. routine for very smooth movements.
When I get a chance I'll upload a video.
Here is a link to the code (in Bascom-AVR)
-Glen
An advanced line follower with quadrature encoders, MicroSD Fat32 recording and more
- Actuators / output devices: Faulhaber geared motors (141:1 ratio)
- Control method: Auto line follower with P.I.D. controll
- CPU: Mega644P
- Power source: 2 LI-ION 7.2 V pack
- Programming language: Basic, Bascom AVR
- Sensors / input devices: IR LED, Quadrature inputs from two motors
- Target environment: indoor