


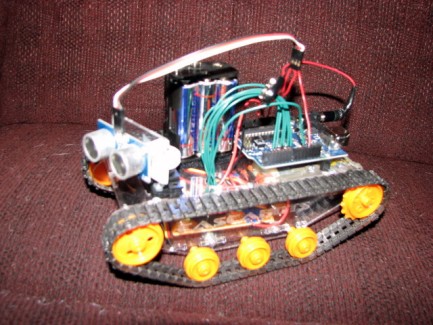
RoverBot
This is my Roverbot. He is a very simple robot, all he does is basically what the "Start Here" robot does, but with a casca tankbot chassis, an arduino, and a custom motor/servo driver board.
There is also 1 tiny innovation in his code, I made a very small circular buffer to record his last 10 decisions, which I use to prevent him from oscillating back and forth when he drives into a narrow dead end (he will instead just turn around ~180).
Also, I built his gearbox with the really high ratio so he is super slow, so I might rebuild it with the lower ratio to make him faster.
Code is attached for your downloading pleasure...
Update - 12/18/2008
Roverbot had his gearbox rebuilt with the lower ratio, so he is faster now, but I need to update his timing constant in the code to make him not run into stuff as much. Also, I have had some breakage issues with his chassis, the acrylic is very brittle, I wish it were lexan instead, that stuff is nearly unbreakable. Will post a new vid soon-ish once I update his code...
Navigate around via ultrasound
- Actuators / output devices: Tamiya 70097 gearbox, Hitec HS-422 servo
- CPU: Arduino
- Power source: 9v 6xAA
- Sensors / input devices: Parallax Ping)))
- Target environment: indoors