



RoVEr - Robotic Vacuum (by) Eric
The build is covered on the blog I started for this bot (linked in additional info) if anybody is interested. It is far too long and I don't want to copy and paste the whole thing and attempt to get it formatted as well. I would love some input and feedback if anyone gets bored enough to read through it all, it is not as detailed as I originally had hoped, but it's some form of documentation for how I did things.
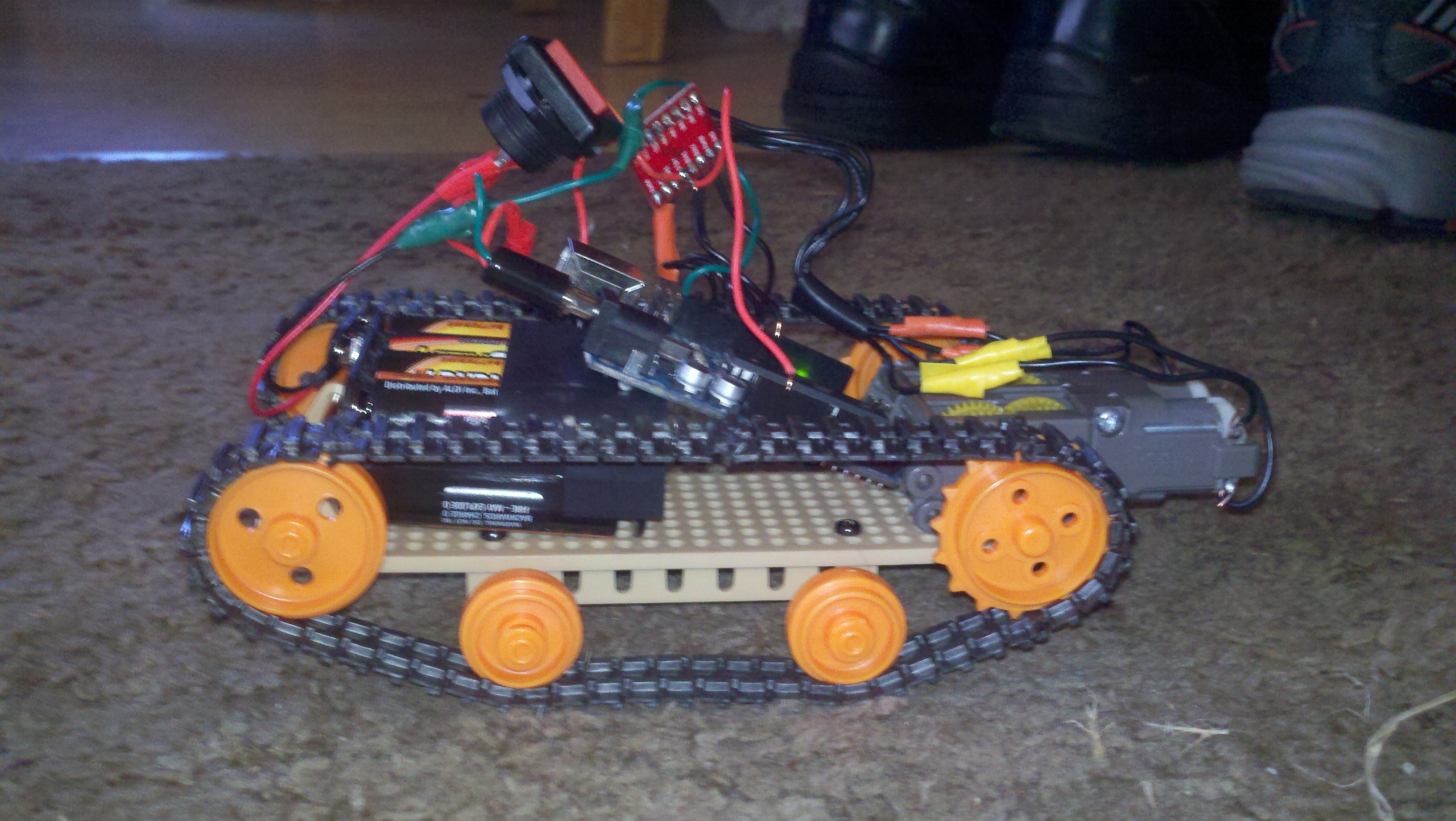
This is based around the following pieces:
Arduino Uno
Tamiya Tracks
Tamiya Twin Gearbox
Tamiya Plate Chassis
TB6612FNG Motor Driver
8xAA Battery Holder from Radioshack
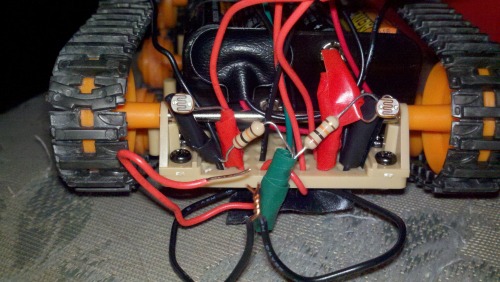
Today I added the capability of a bump sensor to be installed, however in practice my simple bent 20ga wire bump sensor does not, unless I press it the right way, actually work. My plan is to make a dual bump sensor on the front so it knows if the bump came from the left or right and can respond accordingly, although ultimately I hope to achieve navigation via an infrared distance sensor or ultrasonic distance sensor, and have the bump sensors for things the aforementioned sensors may not "see." This is my first robot project, and other than one of those learning circuit kits when I was 13 my first foray into electronics.
I'd love to post a schematic to show all you smart people, but I do not know how to read, or make one so we'll have to skip that part.

Navigate (semi) autonomously
- Actuators / output devices: Tamiya twin gearbox
- CPU: arduino uno
- Power source: 12v 8xAA battery pack
- Sensors / input devices: Two photoresistors, a crappily designed bump sensor
- Target environment: indoor