


Rover robot
What every tech-nut dreams of; build your own robot! Finally I built my obstacle avoiding rover robot using;
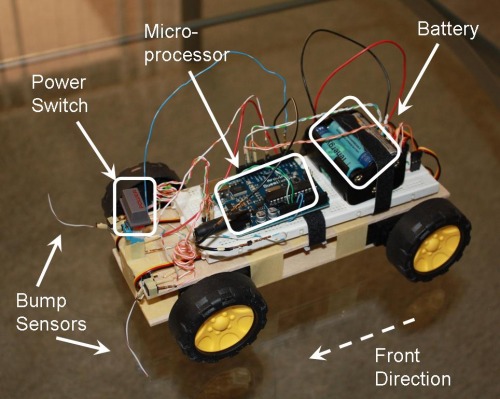
- Arduino Duemilanove – robot brain
- Hi-Tec HS 311 servos – actuator/ drive for wheels
- spring loaded single throw switch for sensor (mustache/bump switch)
- wheels from a “99 cents only” store toy
- don’t own a drill (sigh
 I know) so used masking tape to hold plywood sheets which form the chassis
I know) so used masking tape to hold plywood sheets which form the chassis
It is a simple one, to get my feet wet; Arduino drives 4 servos, mustache detects obstacles, simple algorithm reverses rover and turns it to avoid obstacle. Turning is achieved by reversing rotation direction on one side of the rover.
*** Please visit http://arunwaves.wordpress.com/2010/05/05/rover-robot/ for more pics and video.
Feel free to ask any questions.
Obstacle avoidance rover
- Actuators / output devices: 4 servos
- Control method: Full autonomous
- CPU: Arduino Duemilanove
- Power source: 9v battery
- Sensors / input devices: bumper switch x2
- Target environment: indoor, mild outdoor