



Rover mK2 / Prototype
Hello everybody,
Today, i'm introduce you to my most important project, the Rover mK2 :
I'm working on robot since i've 14 yo. Like you, i've start this hobby with cheap homemade robot (a plank of wood, two DC motors and a cellpack) but now, i'm 22 yo, and after several robot project, i've decided to build one, who look like a professional one.
So, after 5 month of work, in parallel of my work at the factory, i've made that :

He is wholly made in 3mm of aluminium sheets, laser cut by a company in France.
(Robot is currently on a wood plank with plastic wheels to move him effortlessly, the black net is a grip plastic sheet)
//*********************************************************************************************************************//
Motorization part :

The motorization is based on a pair of the powerfull RE850 from MFA, to reduce the speed and upgrade the torque of them, i've designed a reductor, all of gears was in steel and have been turn machining to reduce their thicknesses and fit in my gear box. All of the axes was mounted on balls bearings to reduce noises and friction.
//*********************************************************************************************************************//
Frame part :
Soon
//*********************************************************************************************************************//
Electronic parts :
I've also designed all of my electronics cards, i've decided to make a card for each fonction.
All the PCB have been made by OSHPark, in USA.
2 power supplies, 5V1A, and adjustable :

Power interface for motor :

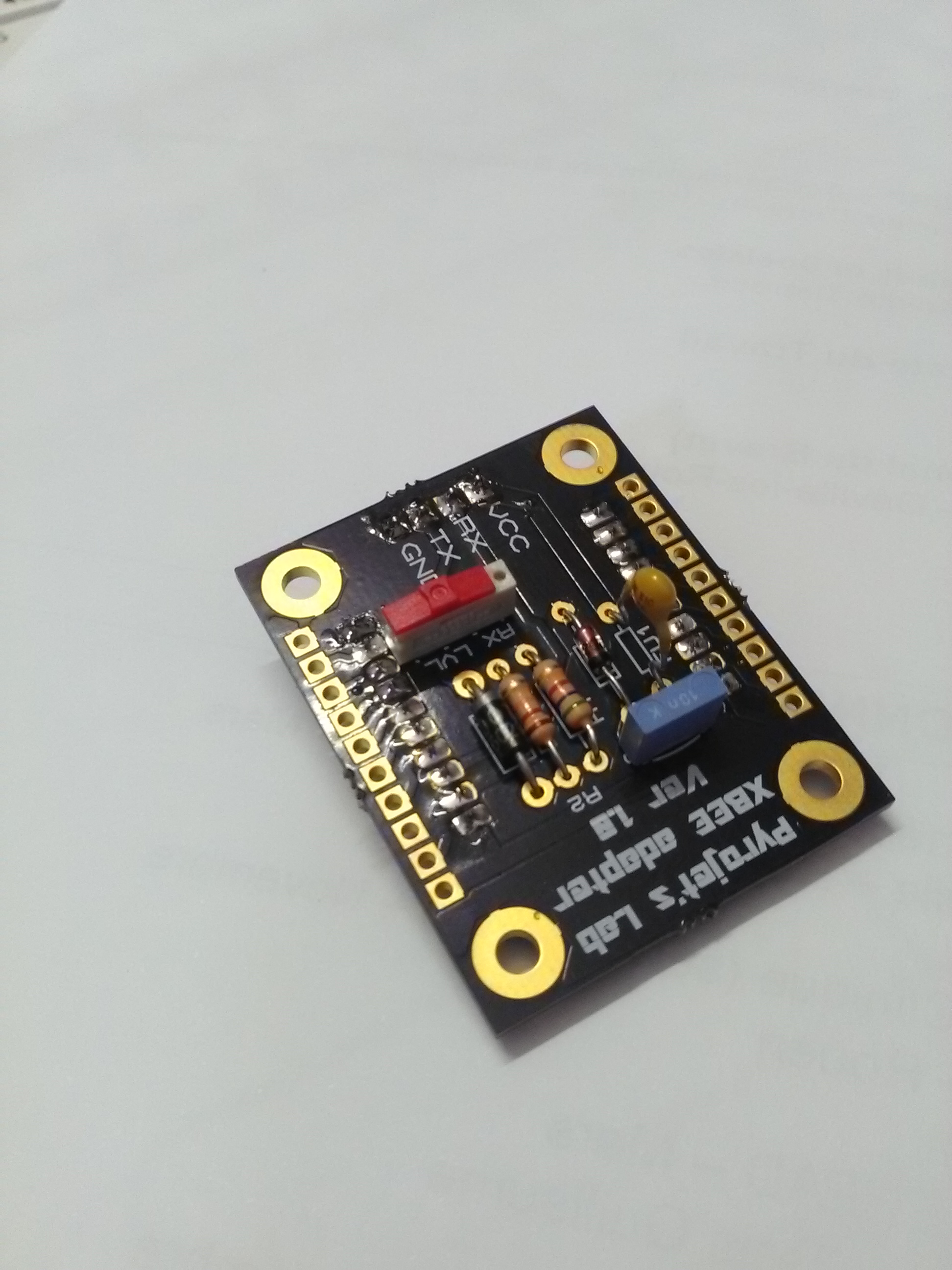
Wireless Serial communication :
Headlights :

Main control, based on a 328P from Atmel, with an Arduino bootloader :
/!\ This robot isn't finish yet, i will update this post as soon as possible. I would add more informations and pictures soon :D
- Actuators / output devices: 2 MFA RE850
- Control method: XBEE Serie 1
- CPU: Atmega 328
- Operating system: Arduino
- Programming language: Arduino
- Target environment: Indoor or outdoor