



Rover kitten locator
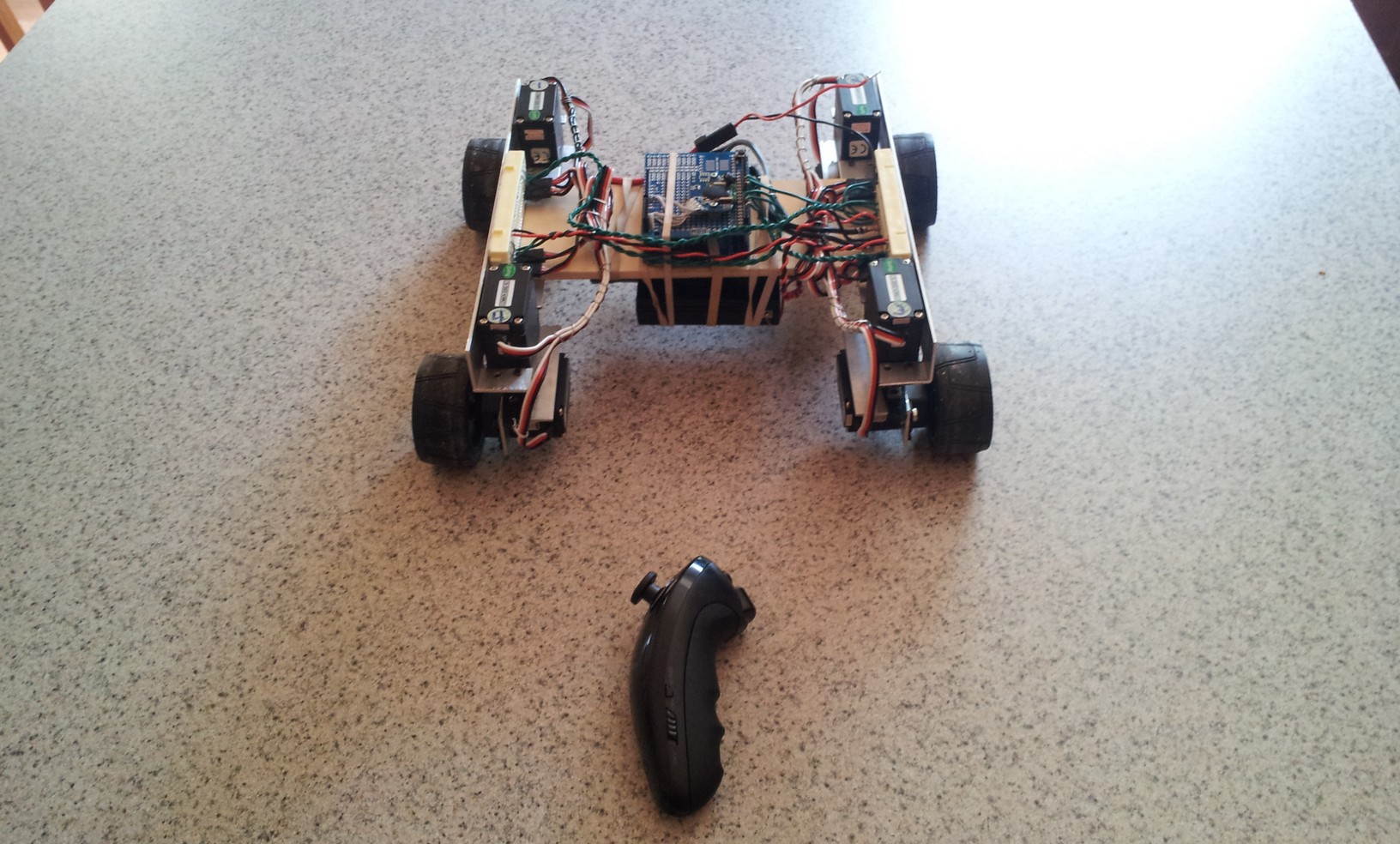
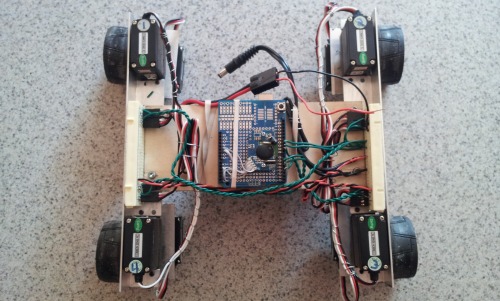
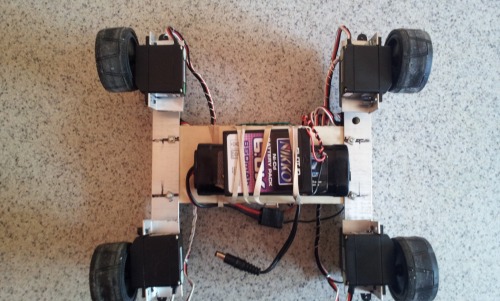
Hello to all and thank you for looking at my ongoing project. This is my first LMR project, inspired by all the fine examples on this website. So far I have built my chasis from scratch, and modified 4 servos for continuous rotation, and use 4 servos to navigate. The tools used to build the chasis were a drill press, dremel tool, scroll saw. I would appreciate any feedback to help continue the development of the platform. I would like to add a basic arm, web cam (cell phone), navigation sensors, not sure which type to use yet.







Thanks again for looking, leave a comment.
jsh6061
4-18-2012 Update
Today I worked on tracking a straight line. I used resistors to convert the servos to continuous rotation. I was trying to use a multiplier to find the dead zone for the continuous servos. This caused them to be out of sync. I installed the potentiometers, and set the servowrite. to 90 and adjusted the potentiometers to get no movement. I am using an arduino uno and curently only have 6 pwm outputs. I was using 4 for the continous servos and 2 to steer. I switched to 4 for steering and 2 for continuous. I am able to align the wheels much better and currently with the continuous servos all set to the same 90 setting for neutral, the rover now tracks almost perfectly straight. I also added the top deck for future additions, ie sensors, arm, camera.
Thanks for looking.
jsh6061

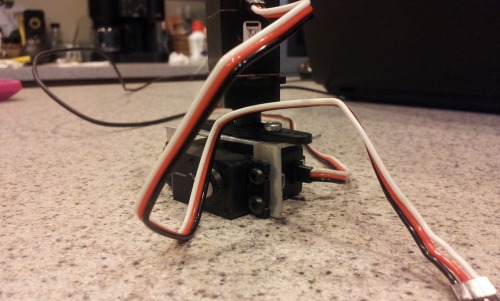
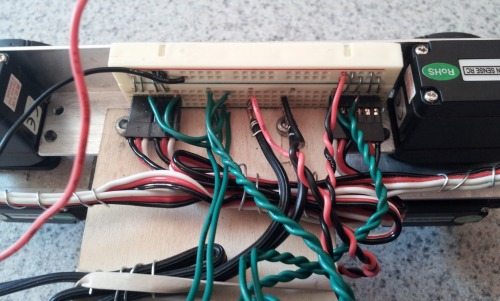
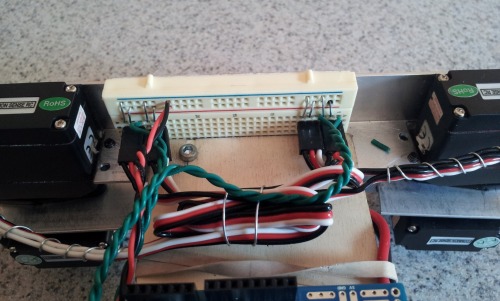
The potentiometer for adjusting neutral for the continuous servo, one on each wheel.
.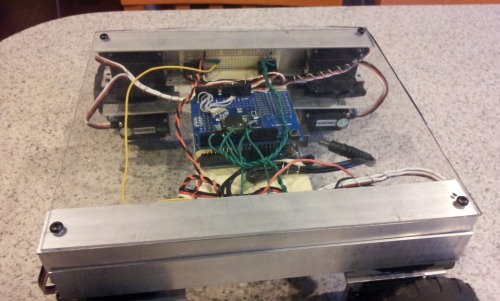
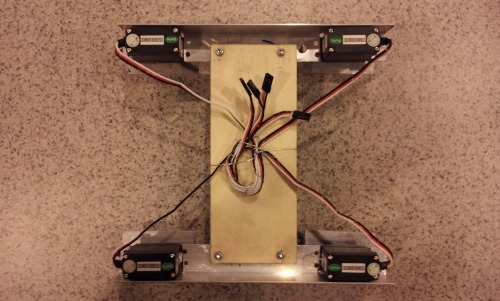
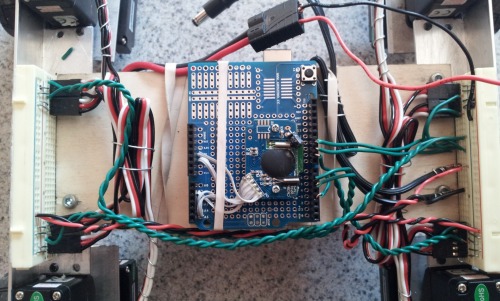
The upper deck, ready for the fun stuff !!!!
Navigate around via remote control
- Actuators / output devices: 8 servos, 4 stock, 4 modified for continuous rotation
- Control method: wireless wii nunchuk
- CPU: arduino uno
- Power source: 7.2V NiMH 4200ma for servos, 6V NiCad 650ma for Arduino
- Sensors / input devices: none yet
- Target environment: indoors