


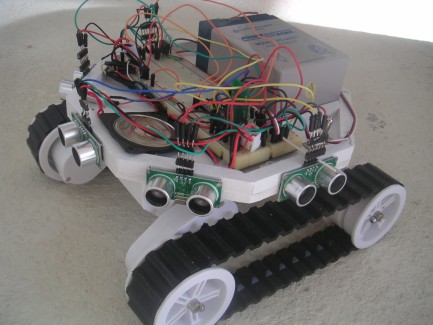
Rover 5 Robot
The Rover 5 platform is relatively inexpensive and has great motors with integrated wheel encoders. The whole system is programmed through RobotBASIC communicating over a wireless link to a RobotBASIC Robot Operating System on a chip (RROS). I was especially impressed with the quality of the encoders for the price. I used five ultrasonic sensors around the front of the robot that act as three different types of sensors. When objects are very close they show up in the rBumper function - slightly further away they show up in the rFeel function. When rRange is used, the system reports the distance to objects and used the sensor whose orientation is closest to the specified angle. The RROS chip manages the Bluetooth communication and can handle many other sensors automatically, including Battery Voltage Monitoring, line detectors, a compass, wheel encoders, and a beacon detector. The RROS chip also controls the motors and uses the wheel encoders and the compass (when available) to assist in making turns and specified travel distances. The RROS chip made construction easy with the entire wiring requiring less than 30 minutes - and no low level programming. The RROS chip will be featured in an article in the September issue of Servo Magazine.
It can easily avoid objects and go around them using the ultrasonic sensors. If the other supported sensors are added it can do many hobby oriented tasks.
- Actuators / output devices: Rover 5 dc motors with encoders
- Control method: RobotBASIC through bluetooth link
- CPU: RobotBASIC Robot Operating System on a Chip
- Operating system: RROS
- Power source: 6 volt gell cell
- Programming language: RobotBASIC
- Sensors / input devices: Ultrasonic rangers
- Target environment: Indoor or outdoor