



Rover 2.0
Update April 1st
Well the dust has cleared and I have finished and submitted my Google Science Fair project and I very happy with it. I have added the site under the additional information and have also added the video. I think the the robot works great but I think I might try adding wheels and swapping over to some rechargeable batteries. The only problem I really had was shedding the tracks when stuff got stuck in them. Other than that I might play with the code a little bit.
Update March 6th, 2012
I have added a new video of it navigating. The video is taken with my phone so its not the greatest but its better than nothing. It is the only video with the IR Sharp since I just swapped over to a PING and and atlering the code now so the PING will work. I will have a bigger update soon.
Update January 25th, 2012
It has been a while since my last update but a lot has been done to the Rover. Some of the big achievements include some basic coding(Really basic just to get it moving and doing something.), finishing the arm, and sorting out some electrical problems caused by running the logic power supply for the motor controller straight from the picaxe which caused problems with somethings not getting power. Also I will add a video of some (basic) navigation tomorrow along with more pictures(I thought I had more of them).
Short term goals:
Work on doing more advanced tasks
Add Wii Camra
Add gripper to the end of the arm
Replace Sharp IR with SFR05 (I had the SFR05 on already but could not get it working but found out the problem was with power distribution on the picaxe)
Swap to rechargeable batteries
Work on the Google Science Fair submission site
___________________________________________________________________________________________________________________
Update January 1st, 2012
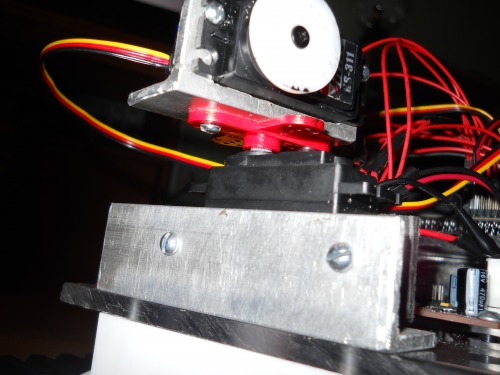
I now have about half of the arm finished and am working on finishing it and have started working on the gripper that I will put on the end of it. Also I have cleaned up some of the wiring. Below are some pictures of the half of the arm I have built. Also I added 2 videos. One is a little driving test on carpet and the other one is a little demonstration of the part of the arm I have done. I taped a screw driver to the arm so it is easier to see the arm move.
Update December 25
I now have this robot moving. I added a SHARP IR sensor on the front for cliff detection and have started thinking about the arm. Currently I just have the robot detecting table edges. Now the arm is my main focus.
Here are things I want with to accomplish with the arm:
Have a gripper on the end of it
Make it be able to get the end of the arm paralel to the ground
Have a sensor on the end of the arm (Probably a knock off Ping from China)
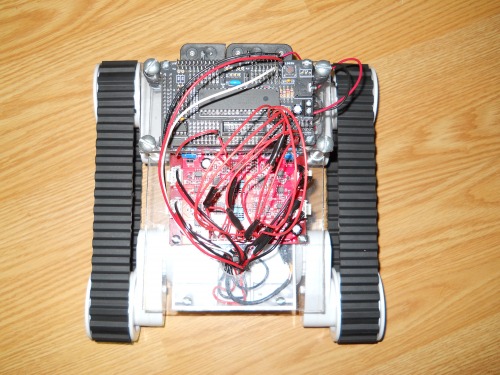
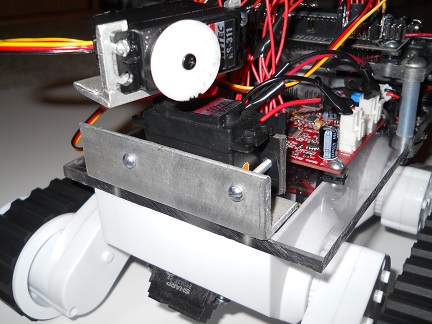
Top view
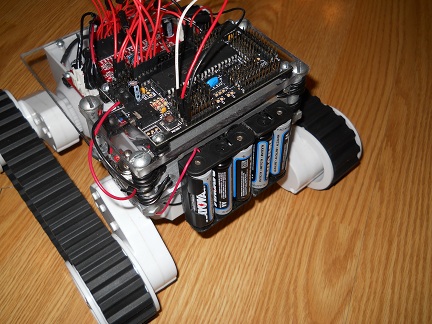
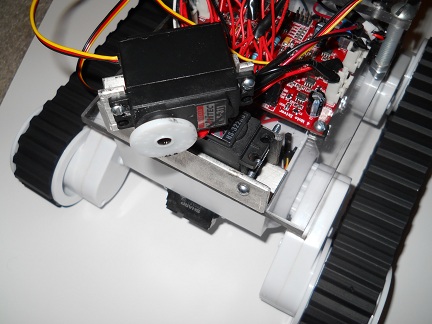
Back view
___________________________________________________________________________________________________________________
Update December 4
My motor controller has arrived and I just installed it on the robot. It was bigger than I expected so I had to move some things around to make it fit. Originally, I was planning on putting it below the plexi-glass top but now I have it where the batteries were originally on the "deck."
Now, after the Google Science Fair I am going to probably customize this robot and enter it in this fire fighting competition. http://www.trincoll.edu/events/robot/ Thank you robotgoldfish for bringing that competition to my attention.
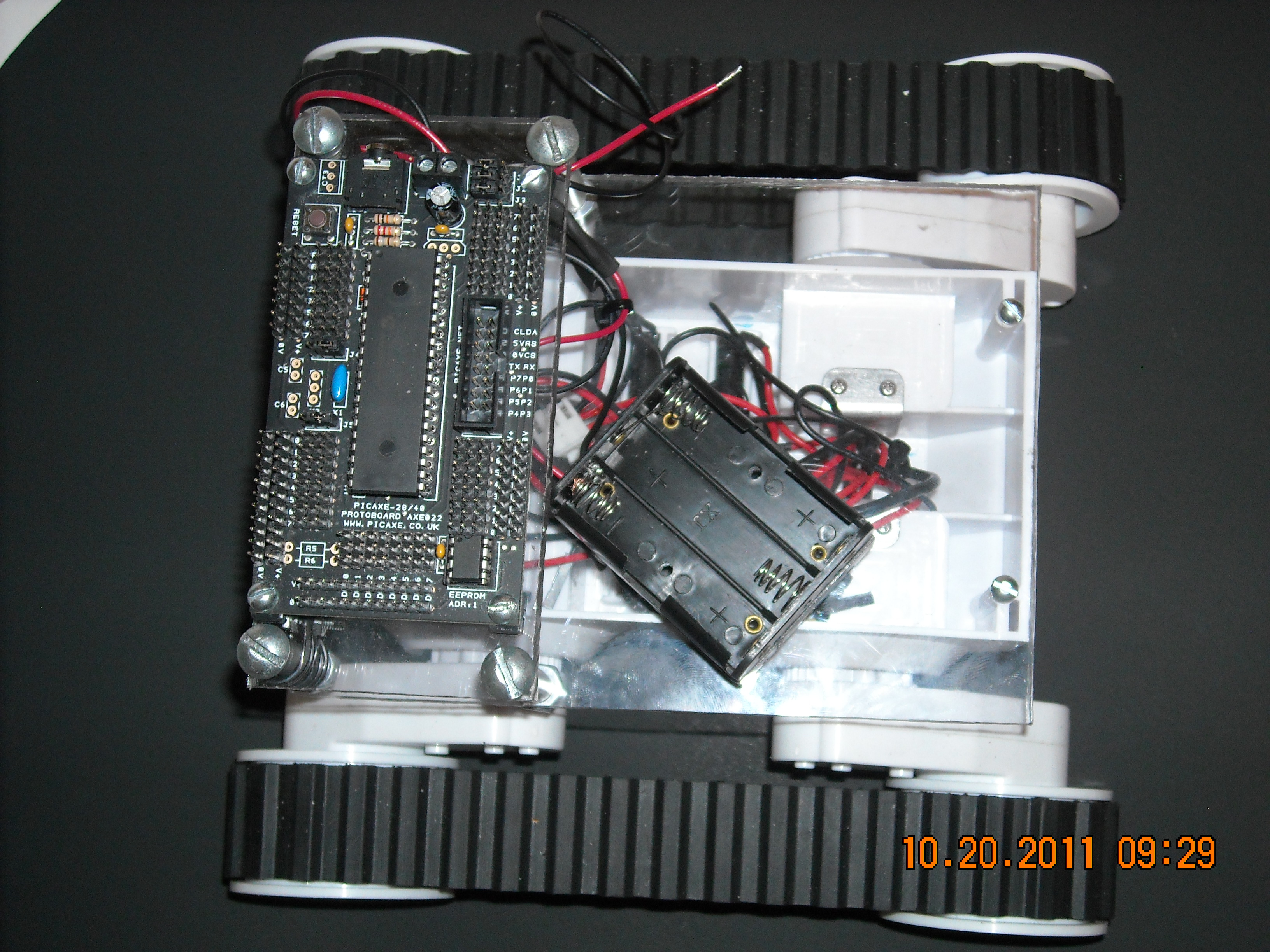
Here are the pictures that I had problems uploading. These are kind of out-dated now so I will have to take some more but they show the general idea.

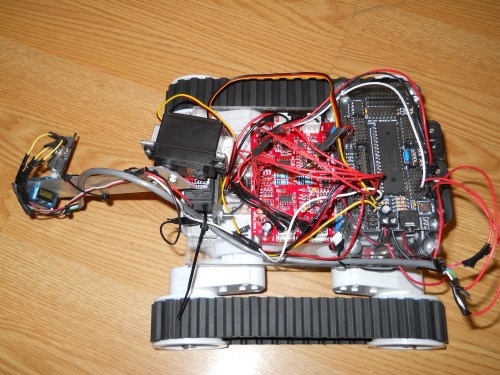
This is a current project of mine that I am building for the Google Science Fair 2012, along with the reasons that I wanted to build a rover and play with Dagu's Rover 5 platform. The goal for this project is to build a robot platform that could explore(It would be able to work autonomously but could be controlled for more complex observations) and report back it's findings to a computer along with be able to be easily customized to do more specific tasks other than exploring. There are many different customizations that I could think of. One could be having a PIR sensor added and waiting for animals to pass. Then when the PIR sensor was triggered it could watch where the animals go with a camera and report back to a computer to help study their migration patterns. Another idea was to wait out in a forest and it being able to be remotely controlled to watch a plant develop over time. Those were a few ideas that I just had on the top of my head.
My plan for this was to start off with the Rover 5 platform with the 4 motors plus the encoders. Then, I would drive the base with a 4 channel motor controller from Dagu which is currently in the mail. After that I built a top for the rover out of plexi-glass and made a spot for the batteries. On top of this I mounted a picaxe 40x2 which I will be using to control it. Finally, I just started working on an arm which will probally have 5 DOF and a gripper on the end along with a Sharp IR. Also there will be a Sharp IR on the front of the robot for cliff detection.
Things to do:
Work on the arm
Add the motor controller(When it gets here) Done
Clean up the wiring Done
Code
Think about adding rechargeable batteries and solar panels
There are some more pictures under file attachments because I could not add them here for some reason. For some other reason LMR takes away all my spaces in posts and comments so I will try to fix this quick. Fixed. This problem only occured on my desktop runnining windows XP.
A base platform for exploration.
- Actuators / output devices: Rover 5 motors, multiple servos
- CPU: Picaxe 40X2
- Power source: 5 AA
- Programming language: Picaxe basic
- Sensors / input devices: Sharp IR