



Round Robot Start
Hi, I would like to show you all my new robot.
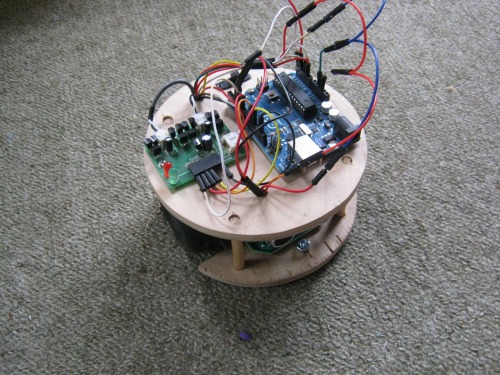
I wanted to make a simple robot base, that I could extend and modify easily, so after a few failed design attempts, I have come up with this.
Basicly it's a round chassies, with all the basics; Two geared DC motors, Motor Driver, Arduino Uno, HC-SR04 ultrasonic sensor, and three ir LED + Phototransistor line sensors.
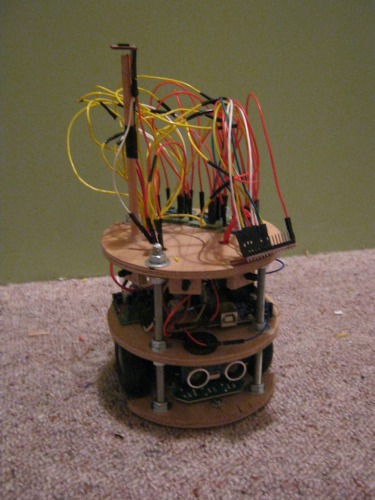
I plan to add another level containing a compass sensor, and more ir phototransistors for detecting and following a ir soccerball.
There will also be a needed 16 to 1 multiplexer, which is in the mail.
I'm sorry there is no pictures of the construction, but it went together quite fast.
More
to follow.
Have uploaded some code, using the HC-SR04 library found here: http://freecode.com/projects/hc-sr04-ultrasonic-arduino-library , which I started using as an attempt to get rid of some problems I came across. Also a line follower, (crude but it works), and a file for testing my motor controller. Hopefully my multiplexer will arrive this weekend and I can continue working on it.


Hi,
I am updating this post with some sad news.
My original plan for this robot was to use a whole lot of IR phototransistors, to detect and follow an IR emitting soccer ball, which is pictured in one of the photos. This ball is used in an annual competition called Robocup Jr. I have entered this competition thrice, using robots made of Lego and all three times making it to the nationals, where bad luck and rule breaking, has only allowed me to scrape once a third. But moving back to the robot, to put it straight, the whole thing was a big failure, the phototransistors not being sensitive enough to detect the ball. This was possibly because of the values of resistor I used, but anyway I have decided to ditch the whole soccer thing and use my robot for another task.
Since last posting which was a while ago, I have made a few upgrades including; a small pezio speaker for simple debugging, swapping the dowels for threaded rod, Adding the third deck for the phototransistors, and adding a compass sensor.
I am unsure, of what to do with it now, but am thinking of possibly adding a claw or something like that.
It's the summer holidays here now and I have a few weeks off school, so will try to do a bit more work on this now, and get something done.
Until then, bye and Merry Christmas.


Update, 10/2/12:
Hi, Just a quick update on the robot, I have made some new sensors for it, just some simple IR distance sensors made from those phototranistors I attempted to use for robot soccer.

I have made two of them and I am going to put them facing on 45 degree offset angles for more advanced object avoiding.
Any comments welcome.
line follow, avoid obstacles, lots of things in the near future
- Actuators / output devices: 2 geared DC motors
- Control method: autonomous
- CPU: arduino uno
- Power source: 4 AAA Cells
- Programming language: Arduino C
- Sensors / input devices: HC-SR04 ultrasonic sensor, line sensor
- Target environment: indoor