


Note: This robot is not installed before delivery, you need to install it yourself according to the installation video or manual.

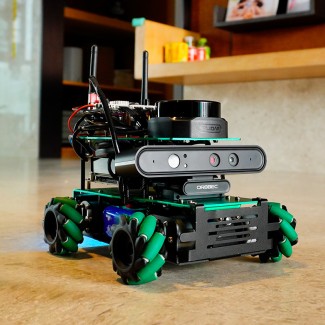
- Aluminum alloy body
- 360° omnidirectional Mecanum wheels
- Lidar
- High-quality depth camera
- Voice interaction module
- Professionally designed expansion board
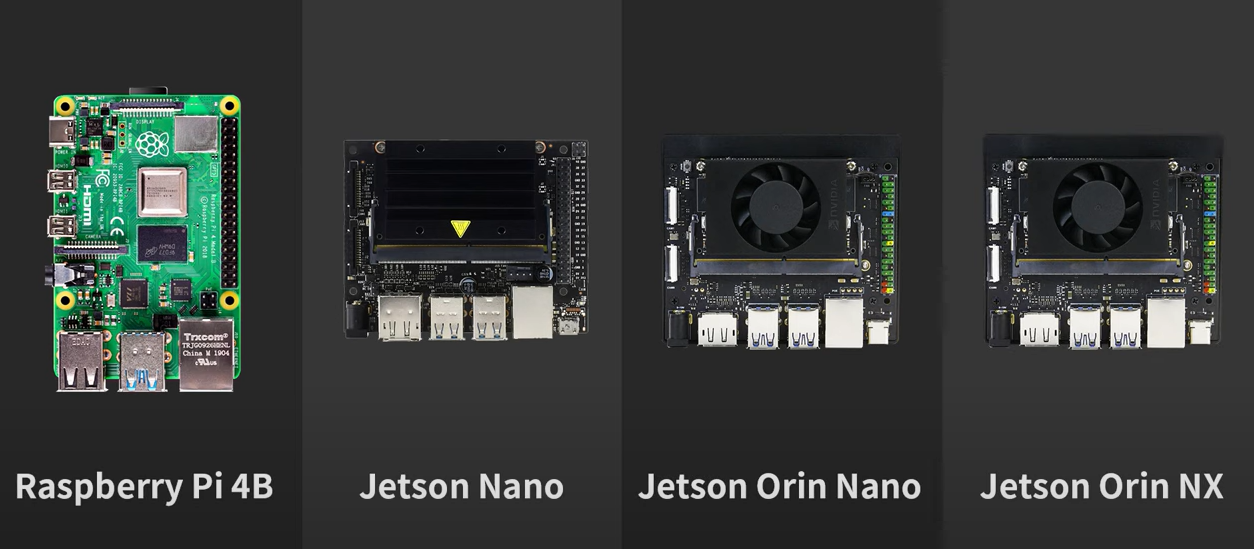
The multi-functional expansion board is compatible with four motherboards:
- Raspberry Pi
- Jetson Nano
- Jetson Orin NANO
- Jetson Orin NX
◆◇◆This is a professional ROS robot that supports more development.
ROSMASRER X3 is equipped with a depth camera, lidar, and voice interaction module, which can realize ROS operating system, RTAB 3D mapping navigation, PCL 3D point cloud, SLAM mapping navigation, Machine vision applications, Voice interactive control, Python programming, STM32 development, MediaPipe development, YOLO model training, TensorRT acceleration.

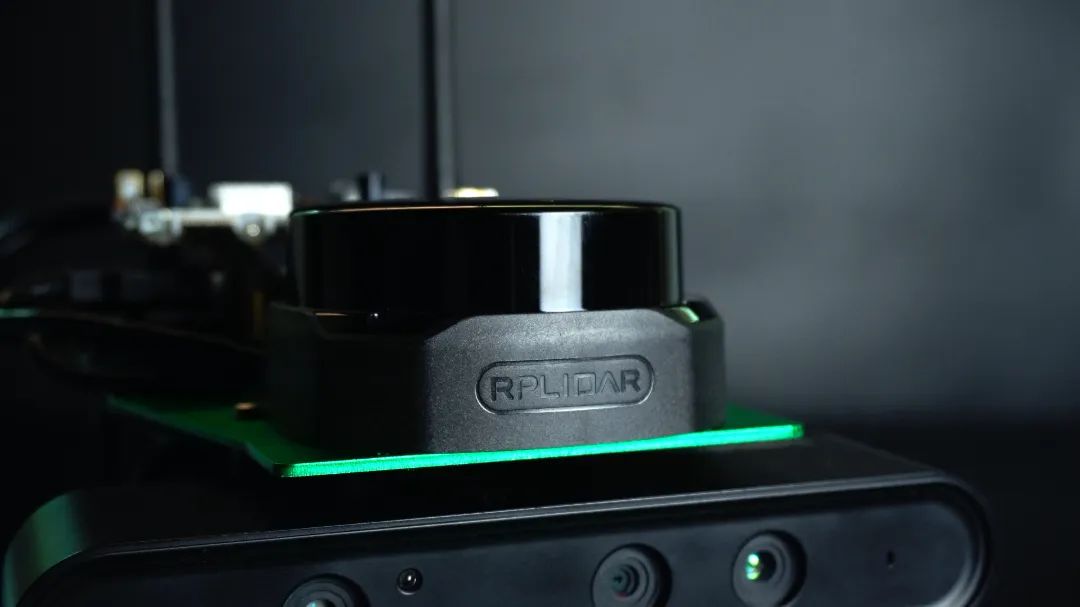
1.SLAM Lidar
A1 lidar adopts the measurement method of triangular ranging, the measurement radius is 0.15m~12m, and the sampling frequency is 8K. Combined with the ROS robot system, indoor mapping and navigation functions can be easily realized.
S2 lidar adopts TOF ranging method, which has better anti-sunlight ability, supports indoor and outdoor mapping and navigation, measurement radius supports 0.05m~30m, sampling frequency 32K, scanning frequency 8HZ~15HZ, supports 1M communication rate, combined with ROS Robotic systems can easily implement indoor mapping and navigation functions.
2.Depth camera
This ROS real-sensing depth camera comes with a color camera(RGB), IR camera, infrared projector, and depth processor. With dozens of functions such as face recognition, gesture recognition, human skeleton recognition, 3D measurement, environment perception, 3D mapping navigation, etc.,

3.Mecanum wheel
It allows the ROSMASTER robot car to achieve 360° movement.

4.Supports a variety of boards
ROSMASTER X3 supports Jetson NANO,Jetson Orin NX,Jetson Orin NANO and Raspberry Pi 4B four boards to choose from, and the usage methods are basically the same, all use ubuntu system.
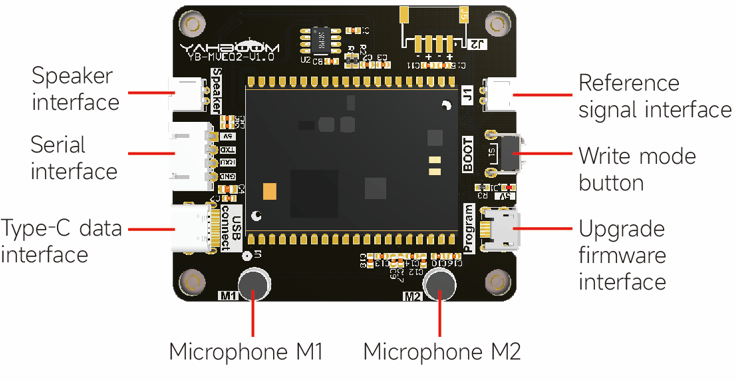
5.Voice interaction module
ROSMASTER X3 is equipped with a high-performance voice interaction module. By issuing voice commands, it can control robot movement, color tracking, color recognition, Autopilot and other interesting functions.
ROSMASRER X3 is suitable for a wide range of applications, including exploration models for professionals, learning algorithms, obtaining terrain in an unknown field, deeply learning AI visual recognition, researching autonomous driving, exploring 3D object recognition, etc.
1. ORBSLAM2+OCTOMAP Mapping
ORB-SLAM2 is an open source SLAM framework that supports monocular, binocular, and RGB-D cameras. Itcan calculate the pose of the camera in real time and reconstruct the surrounding environment sparsely in3D at the same time. In RGB-D mode, the real scale information can be obtained.

2. RTAB-MAP 3D Visual Mapping and Navigation
Using the RTAB algorithm to integrate vision and radar, the robot realizes 3D visual mapping andnavigation and obstacle avoidance, and supports global relocation and autonomous positioning.

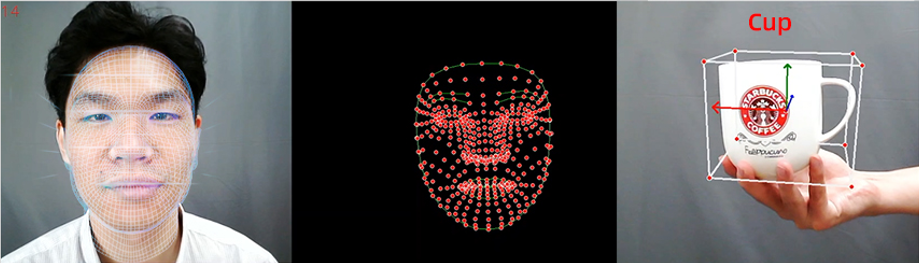
3. MEDIAPIPE development
Through the MediaPipe development framework, the functions of hand detection, posture detection,overall detection, face detection, 3D detection and recognition are completed.
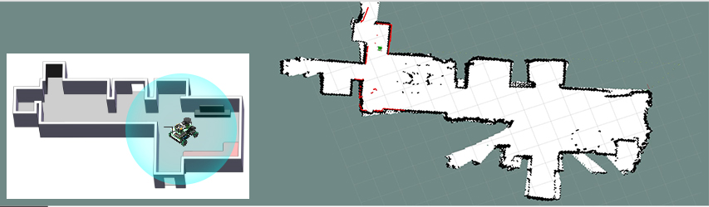
4. Lidar mapping and navigation avoiding
lt can realize gmapping, hector, karto, cartographer mapping algorithms, support path planning,dynamic obstacle avoidance, single-point and multi-point navigation.
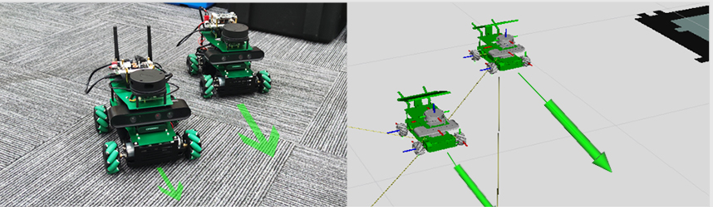
5.Multi-robot navigation
Multiple robots are on the same map to achieve single-point navigation, multi-point navigation, anddynamic obstacle avoidance.
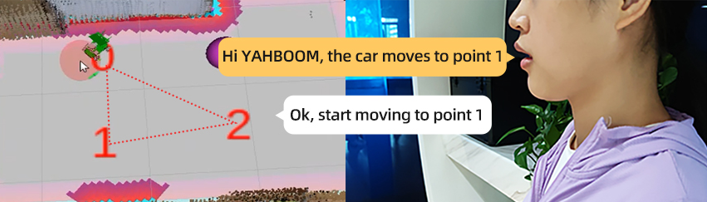
6.Voice control multi-point navigation
The voice recognition module recognizes commands and controls ROSMASTER to navigate autonomouslyto specify coordinate points.
7.Multi-platform linkage
ROSMASTER X3 supports a variety of remote control methods such as mobile phone APP, handle, ROS system, computer keyboard, etc. It can control your robot car at any time, import your code, and is an artificial intelligence robot that listens to your instructions.

8.Rich course materials and professional after-sales support team
We provides 117 dual-language video courses, ROS1&ROS2 system tutorials and online technical assistance (China time). The course content includes: ROSMASTER X3 assembly, Linux operating system, ROS and openCV series courses, depth camera and lidar mapping and navigation explanation, from simple to in-depth learning of mapping and navigation, this is an in-depth learning process.





Summary:
ROSMASTER X3 is a educational robot with Mecanum wheel developed based on ROS/ROS2 robot operating system. It uses Jetson series board or Raspberry Pi 4B as the main controller, and is equipped with high-performance hardware configuration such as lidar and depth camera, which can realize robot control, remote communication, mapping and navigation, follow obstacle avoidance, Autopilot, human body feature recognition and other functions.