



RoMeo Rover
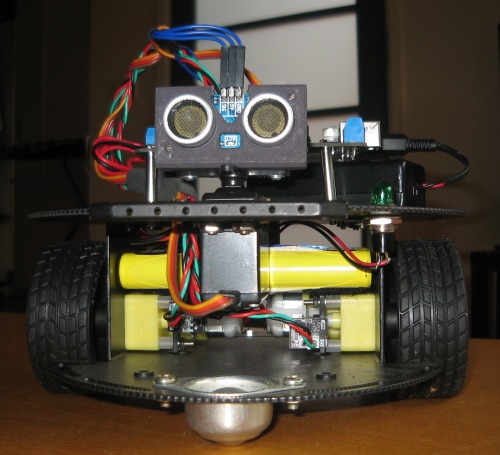
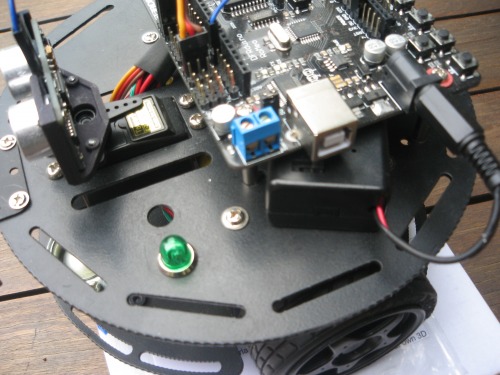
here is a pic of my robot, it's based on a DF Robot RoMeo board with a parallax PING ))) sensor.
basically it just cruises around and when the ping picks up an object it turns right.
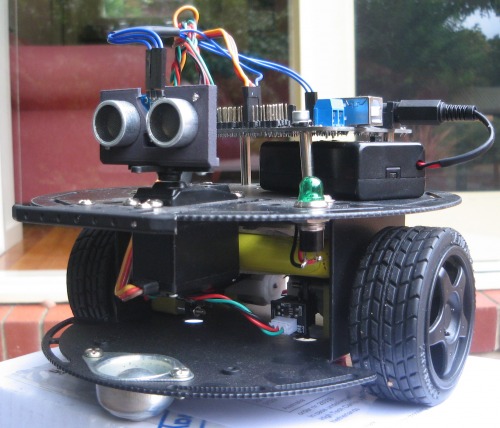
RoMeo Rover now has a set of encoders and a servo for the ping, I haven't updated the code for these changes yet.
THINGS TO DO:
update code.
bump switch.
roams around avoids objects
- Actuators / output devices: DFRobots 2WD platform
- Control method: autonomous
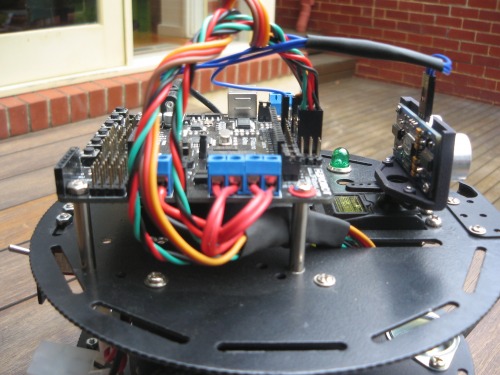
- CPU: DFRobot RoMeo
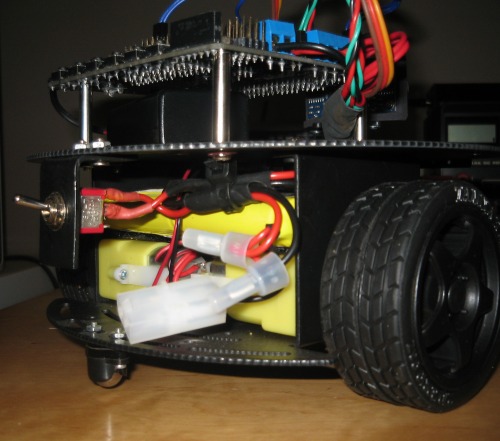
- Power source: 7.12 Nicad RC battery
- Sensors / input devices: parralax ping)))
- Target environment: Indoor or outdoor