



Rocket launching robot - video now also on Youku available
Hi everybody,
Just working on the second version of my model rocket launching robot. The first version was remote controlled (see video), the second version is controlled by a 28-pin microcontroller from PICAXE.
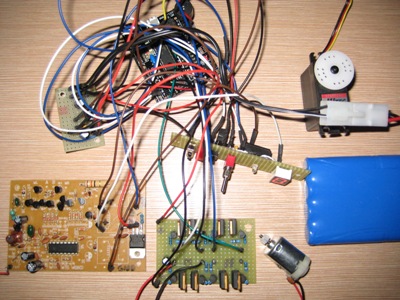
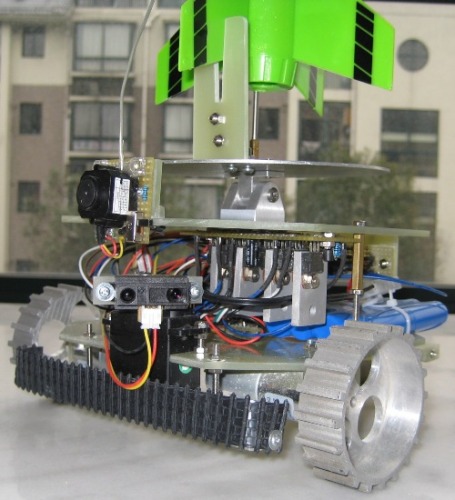
The image above shows the PICAXE project board, the voltage regulator board, the control panel, the power dual h-bridge and the 27 MHz-receiver. The nose cone of the rocket will be equipped with a 27 MHz-transmitter, to transmit data from the rocket to the robot. The 27 MHz-transmitter/receiver is from a toy RC car. The transmitter was rebuilt space saving on a perfboard, modified to run with a lower voltage and additional equipped with a bright flashing LED to indicate the trajectory visual better:

On the servo will be a Sharp distance sensor and a directional antenna mounted, so it's possible that the rover not only launch the rocket automatically but also track back then the landing site of the rocket.
The two front wheels of the rover have already been manufactured:

To launch the rocket, the micro switch has to be in the right position and the pushbutton has to be pressed. After a short warning beep the count down starts, then again five short warning beeps before the rocket will be launched. The red LED indicates if the igniter is connected:

The robot is furthermore equipped with a small wireless CMOS cam, which transmits videos to a laptop in a range of approximately 50 m.

-------------
UPDATE
-------------
The robot got motors & wheels...
Sharp distance sensor...

and it's rear wheel resp. rear ball...

The program for the robot is already written; as soon as the launch pad of the rover is finished, a test video will follow.
-------------
UPDATE
-------------
Decided to add bump sensors on the robot:
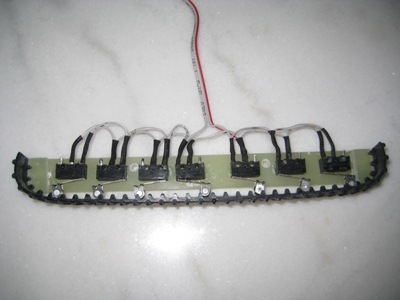
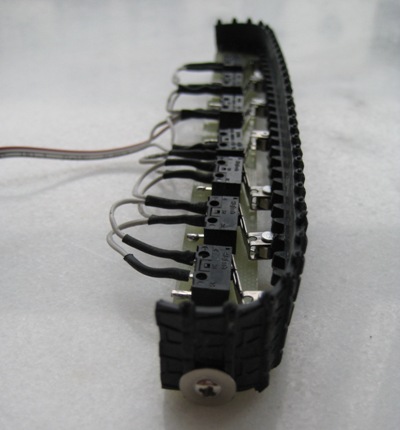
IR, sonar and lasers have blind spots with no coverage. And even Soviet Mars walking robot PrOP-M had bump sensors:
-------------
UPDATE
-------------
Using now the 315 MHz RX/TX Radio Frequency (RF) Link Modules from Sparkfun to transmitte data from the rocket to the rover:
-------------
UPDATE
-------------
My Estes RTF SkyTrax model rockets arrived today. I built in the transmitter. I use a 3.6 Li-Ion battery as power supply (from a small battery screw driver).The battery fits (after some modifications) perfect in the nose cone:
A bright blue flashing LED hopefully indicates the trajectory and landing site better...

Ok, who remember not Rambo's famous quote:
Hamid: What's that?
Rambo: It's blue light.
Hamid: What does it do?
Rambo: It turns blue.
:D
Additional a signal will be send to the robot. In the moment the robot only response with a beep and a flashing LED if the signal will be received. Transmitting of temperature, pressure, radiation, photo, video, position etc. would be thinkable.

The total weight of the rocket with battery, transmitter and C6-4 engine is 134 g. The recommanded max. liftoff weight for a C6 rocket is 113.2 g, so the rocket will not reach the estimated altitude of 213 m with a C6 rocket engine, approximately only 150 m.

-------------
UPDATE
-------------
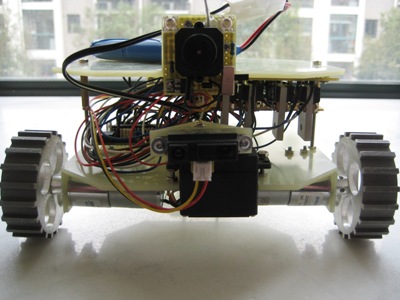
Today I finished the rocket launching robot:

Ready for outdoor test run and rocket launch. Stay tuned for the video...
-------------
UPDATE
-------------
Outdoor test video of RLR - drive on rough surface, rocket launch and tracking of the rocket landing site: http://www.youtube.com/watch?v=vSD16a32keo
Launching model rockets and track back the landing site of the rocket
- Actuators / output devices: one servo, 2 geared motors
- Control method: autonomous
- CPU: Picaxe 28X
- Operating system: Picaxe basic
- Power source: 9.6v nicd 1000mA
- Programming language: Picaxe basic
- Sensors / input devices: Sharp IR, home-made bumper switch
- Target environment: outdoor