



robotic microhandling
Hi all, I wish to share with you my last robot: the robotic microhandler. It is controlled by processing GUI created with GUI builder of G4P library . In the GUI there are 11 buttons :
UP -DOWN to control the vertical microstep of the HITEC HS 5485 digital servo
RIGHT - LEFT to control horizontal microstep of the HITEC HS 5485 digital servo
BACK FORWARD to adjust the position of the microhandler, the HITEC HS311 is mounted on the laser CD mover hacked
GET- RELEASE it controls the contact microgripper moved by ROBBE 8544 analog microservo
FAST set the fast steps, on the bottom of the GUI set the step value using a sliders
SLOW set the step to 1
on Arduino is loaded the Servo firmata changed with writeMicroseconds to move servo of 1 step
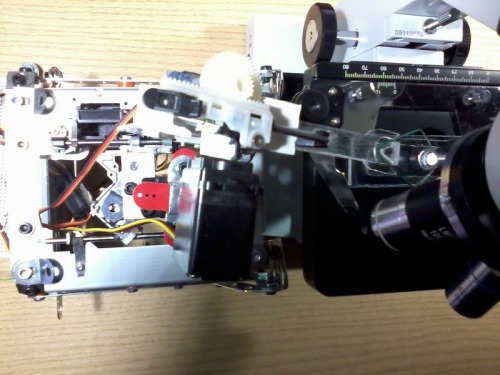
The purpose of the project is move and assemble micro objects (size 10 micron) in the microscope slide , but I'm still working to get the perfect microgripper . In the following images you may see the second version of microgripper using 2 optic fibers for the contact grippers
top view
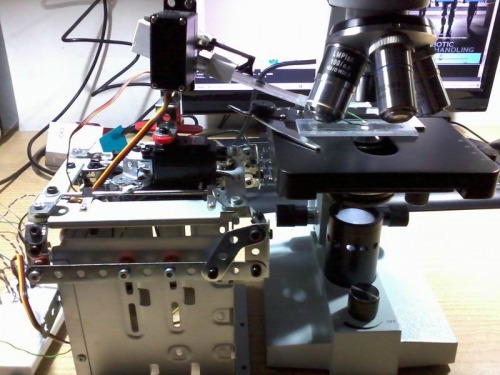
lateral view....for the next version I'm thinking to sersors on the gripper to avoid shocks with the objectives of the microscope

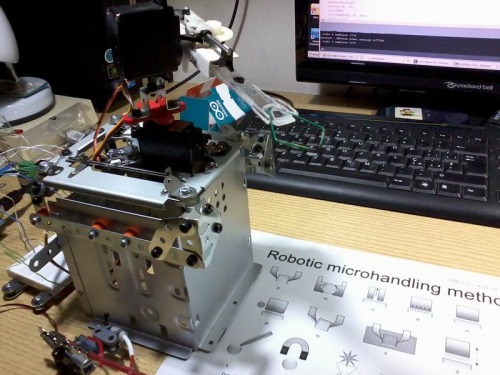
robotic microhandler stand alone...my contact gripper is not the perfect one best microgripper would be a capillary gripper
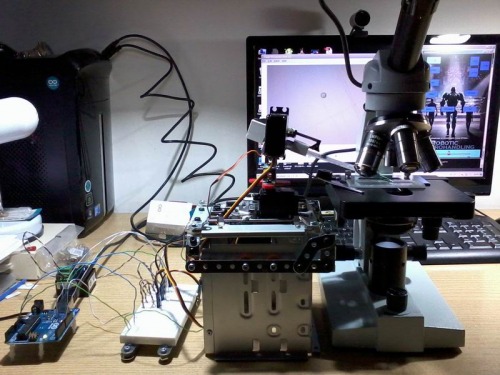
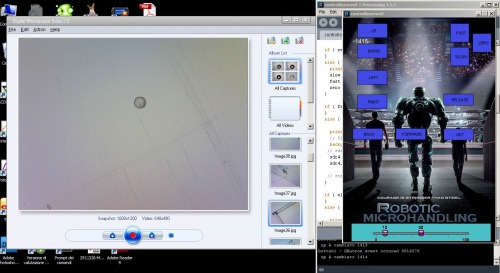
Here you may see on the left of the screen the object on the microscope slide, on the right the processing GUI to control the microhandler
I attached the processing code
Please feel free to add any comment or suggestions
robotic microhandler controlled by arduino and processing
- Actuators / output devices: 2 Hitec digital servo HS-5485, 1 HITEC standard HS-311, 1 micro servo ROBBE 8544
- Control method: controlled by processing GUI interface
- CPU: arduino uno
- Operating system: processing 1.5.1
- Power source: 6V
- Programming language: Arduino Processing
- Sensors / input devices: mcroscope
- Target environment: indoor microscope