


Robotic Arm (AIM System)
My Learn-As-You-Go project...
A few specs for the finished project:
- 6 degrees of freedom - base rotate, shoulder, elbow, wrist, wrist rotate, gripper.
- 12V SLA Battery power supply
- Controlled by PICAXE 28X1
- Sensors - Microswitches in each gripper, ultrasonic unit underslung on the gripper, possibly more.
- Output devices - 8 servos (2 each for the shoulder and elbow joints), LCD and possibly a buzzer for debug.
- Mainly aluminium construction, some brass and MDF parts where required
- ALL HAND BUILT PARTS. I don't buy modules, or kits, because there's nothing they can teach me the net can't.
- No existing plans. This is almost entirely my own design drawing influence from the lynx series of kits.
To date, this is my first project that looks like it will work. As a result it's slow going. I machine parts usually using a dremel rotary tool. At the time of writing I have finalised a ball bearing housing that I plan on building in the near future alongside a new wrist servo bracket... until then, the gripper remains the only completed part of the project (and that took a year or so of experimenting!)
I take any suggestions for it's construction, as long as I'm not told to buy a kit or module, scavenge systems from old equipment (individual parts is ok, but not a whole working system) or that I'm sacrificing functionality for aesthetics. I take some... strange design routes, but a lot of it is simply to impress the guys at school more.
I have lost track of how long I've been working on this, and how much spent, but both are quite high... and my budget is running out, which has been a recent issue.
On a final note, AIMS, or AIM system, stands for Artificial Intelligence Manipulation System.
The gripper servo connections
The gripper touch switches
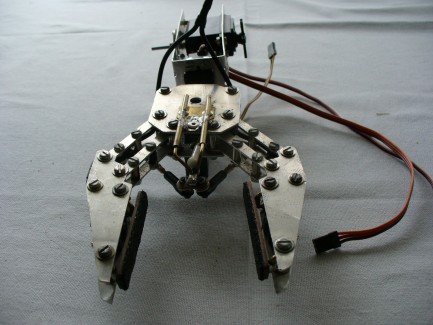
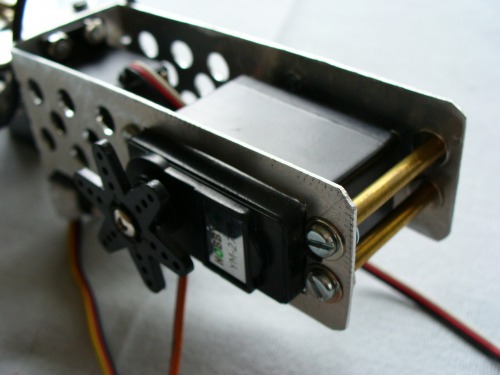
Actuating Mechanism
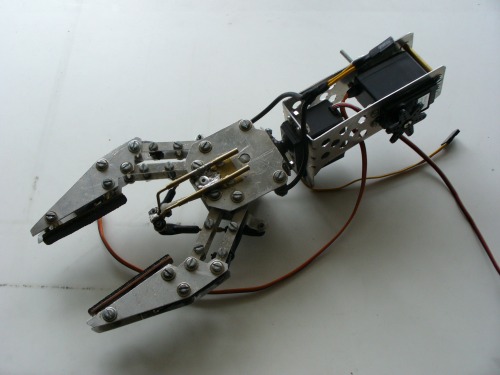
Side View
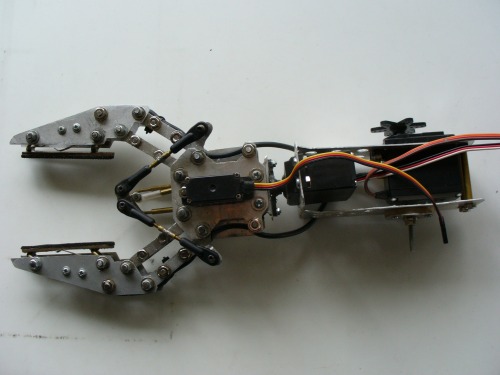
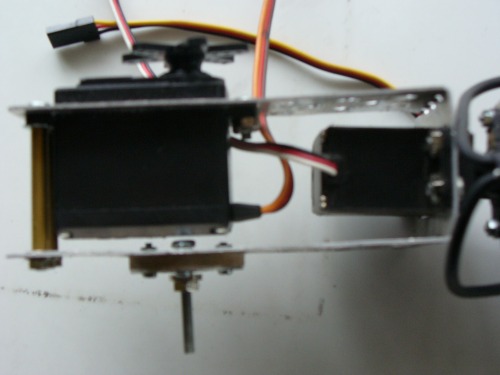
Bottom View
More updates to come!
UPDATE 28/6/09 - Wrist Completed (Lower Arm still to be added)
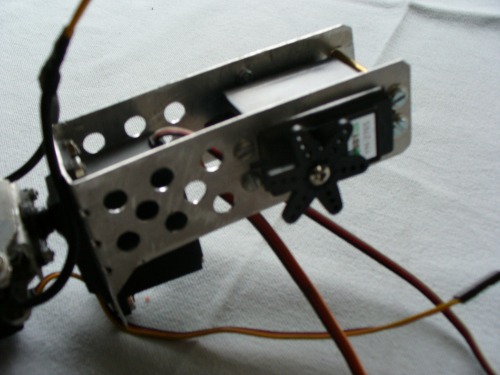
Sorry for some blurry images... Camera focus really wasn't working.
Basic Robotic Arm - Able to manipulate a variety of objects within large size and location parameters.
- Actuators / output devices: Servos (8), 16x2 LCD, small buzzer, various lights for the hell of it.
- CPU: Picaxe 28x1, LCD interface Picaxe 20M
- Power source: 12V SLA Battery
- Programming language: Picaxe basic
- Sensors / input devices: ultrasound, gripper touch switches
- Target environment: Proof of Concept (Lab/Garage)