


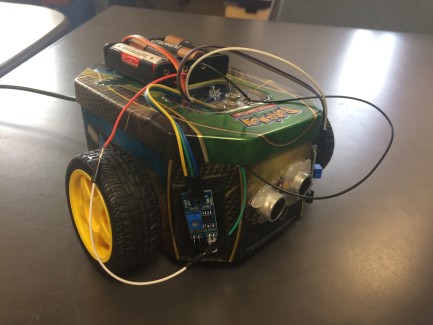
I firstly found a pokemon card tin at the dump for free. Then I had grabed some long m3 bolts, drilled three holes on each side of the robot, one hole is for the shaft for the wheel while the others are for mounting the motor, and then I bolted the motors from the inside of the robot. Once the motors are mounted I then attached the wheels. After that I grabbed a breadboard and a l9110 motor driver and wired everything together with an arduino nano on the breadboard. I used double sided sticky tape to mount the arduino and edge detecting sensors to the robot. The edge detecting sensors are on the side of the robot while the arduino with it's bread board are on the inside. Then I drilled two holes on the front of the robot so I could hotglue a HCSR-04 sensor to it. Lastly I hotglued a batter pack and drilled holes for a power switch on top of the robot.
I wired the Arduino nano, proximity sensors, and the power switch to the batteries. I hooked up the Ping sensor to pins 3 and 5. Then I hooked up the motor driver to pins 6, 9, 10, and 11. After that I hooked up the edge sensors to the pins A0 - A2.
Enjoy!