



Robot Leader
Goals:
- Head swivel to follow motion and/or sound (head currently moves in response to motion, but does not track motion or sound)
- Remote control of lights and other appliances via X10 (I may never do this)
- Audio playback of pre-sampled sounds and voice responses to stimuli (perhaps next year)
- Auxiliary audio jack to play radio, walkie-talkie, or other audio source (no longer a goal)
- Add coaxial jack for programming the Picaxe
- Shoulder mounted lasers
- Green LED eyes that react to stimuli (Done)
- Remote control of subordinate "Awesomemax" robot models (maybe I'll add XBee an radio for this some day)
The first video is from Halloween 2009. I will try to upload a new video soon.
Update: 2011-10-10
Well, Robot Leader has been gutted. The Picaxe brain, which was originally from my very first Star Here robot, has been stolen to drive one of propellerheadgeek's laser cut tank kits. I'll post that robot soon.
Of course, it's almost Halloween. I have another Picaxe and board I can use, so maybe Robot Leader will rise again!
Update: 2010-10-19
I did some reprogramming, and added PWM control for his LED eyes. Unfortunately, I'm having some problem with the Picaxe resetting during operation I posted about it here. This is an older Picaxe28x1 chip; there is a chance it is being affected by a firmware bug that is causing the reset when I try to turn off the servo pulses so I can use PWM.
I made some adjustments in the code to minimize the impact, so at least his is somewhat workable for Halloween.
Oh, I also replaced the servo I was using with a different one. I'm getting a ton of audible servo noise. It seems to be some sort of reaction to the metal case, because i don't get any noise with the same servo when it is not mounted. Anyway, the new servo is still noisy, but less so.
Update: 2010-10-18
Well, it's approaching Halloween again. Time to revamp Robot Leader. The poor guy has been gathering dust in the corner of our hallway for a long time. This year, he's getting some upgrades!
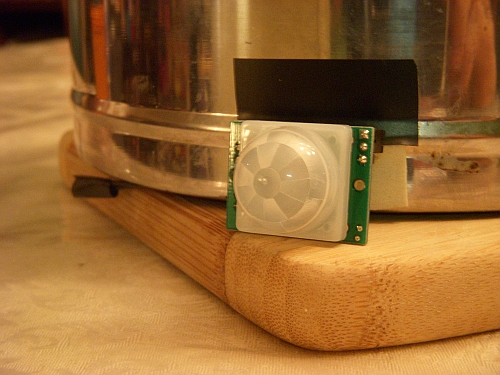
I long ago removed his SRF05 sonar sensor for use on GRAB-E. I almost bought him a Parallax Ping sensor to replace it, but I'm trying to keep robot building costs down, so I went with a Parallax PIR motion detector from Radio Shack for about $10.
Edit: 2011-10-10
See this tip about getting this sensor working with 5V logic.
Next, I cracked open his metal head.He's totally rewired. His head used to be a completely separate module from his body, with independent power, and no electical integration. Now I have run wires down his neck and I can control each LED eye separately from the Picaxe. I also moved his piezo speaker element up to his head, and ran power up to his nose switch. So now his nose is the main power switch.
Even better, I mounted his head more permanently to his body. The motion is now much smoother and looks great.
I'll try to get some pics or videos of him in action before the end of the month. I still have some tweaking to do on his code.
Update: 2009-10-30
Inspired by this post from Salvage, I ordered a couple of gameDR Smack Talk for the XBOX units. I expected they would arrive well after Halloween, but I was pleasantly surprised when they showed up yesterday.
After some messing around to fabricate an adapter cable, I was able to record and play sounds from the Smack Talk through the speaker in Robot Leader's head. Unfortunately, the volume is way too low, so I need an audio amplifier.
That led me to this post from Calculon320 on building an amplifier with an LM386. I scrounged around my old electronics for an LM386 but came up blank. Then I remembered I had one in Lefty the Mousebot, who has been sitting idle for quite some time. I had to disect poor Lefty, but since I used an 8-pin IC socket there was no permanent damage. I took the opportunity to remove his 9 volt battery while I was at it. Lefty is in long term storage.
So the next step is to breadboard an amp and try it out. If successful, I will eventually integrate an audio amp into Robot Leader's head. I'll probably add a dial on this noggin to let you adjust the volume.
Later that same day...
I breadboarded the audio amp, and it definitely amplified. However it also added a lot of noise. It could be cleaning it all up on a perf board would fix some of that, but it is very noticable.
Update: 2009-10-23
I decided to revisit this bot for Halloween. Right now he's sitting just inside the front door to the house. An SRF05 ultrasonic range finder detects when someone is near. I added a servo to move the head. When someone gets close, the bot shakes his head "no" slowly and emits some warning beeps. If they get closer, the head shake gets faster and the beeps change tone. If someone gets very close the head shakes very fast, and the beep tone rises in relation to the distance (higher pitch as you get closer).
I just ordered a couple fo the Smack Talk voice recorders, with the idea of replacing the beeping sounds with actual voice warnings. I don't know if they'll get here in time for Halloween, though.
I'll try to upload some pics or a video later if I get time.
Original Post:
OK, this is not really a robot... yet. It was inspired by my 5 year old son, who asked me to build him a robot. He described it to me and I sketched it on paper. Currently we are building the body; the head, torso and arms are essentially done. Work has started on the mechanics of the first gripper claw. It will eventually stand about as tall as my son, unless he grows a lot more before we finish it, which is possible at this rate. ; ]
I was attempting all this without going down the microprocessor route, but everything will be easier, so I'm going to take the plunge.
You can see more pictures and comments on my Facebook profile:
http://www.facebook.com/album.php?aid=9441&id=1443305640&l=32ac6e6224
- Actuators / output devices: Servo for head motion
- CPU: Picaxe 28x1
- Power source: 4xD alkaline batteries
- Sensors / input devices: Parallax PIR Motion Sensor
- Target environment: indoors