


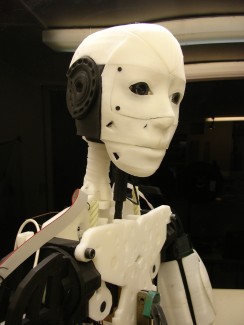
Robot InMoov 3D printed
Here is "InMoov", the robot you can print and animate. You have a 3D printer, some building skills, This project is for you!! This is a hand builded for a job (still picture commercial), it was supposed to be mobile but not animated and mostly be able to take human hand positions. Cables or fishing rods might be added in order to control it, but it was not the purpose of this work at first. I am now working on another model(for the fun), trying to animate it, I really would like to do it with computer control but I have never worked in that field.
It has evolved quite a bit since I started with designing the hand. Both arms are now fonctionnal with a torso and a head. I am using two Arduino boards controlled through MRL.
With the help of Myrobotlab and GroG, we will be trying to make the robot see and grab objects after a voice command.
For more parts and info, see:
http://inmoov.blogspot.com
http://www.thingiverse.com/thing:17773
http://www.thingiverse.com/thing:18939
http://myrobotlab.org/service/inmoov
Here is a BOM I just did for a university that was asking.
Of course you need to have a 3d printer.
Hand and forarm:
2 arduino uno=28 euros ebay although I never found such a good price again.
12 servos MG995=84 euros ebay
Or 12 servos HK15298=180 euros Hobbyking( I recommand those because the others are cheap but they burn)
0,8mm nylon thread/fishing rod= 5 euros hardware store
Miscealenous Bolts= 10 euros hardware store
1500gr natural ABS= 70 euros orbi-tech
Arm and shoulder:
8 Hitec HS805BB=240 euros ebay (better get even stronger in torque and faster)
Miscealenous Bolts= 10 euros hardware store
1500gr black, yellow, natural ABS= 56 euros orbi-tech
Head and torso:
I can't really give specs yet because I am not finished designing and printing.
Batteries + charger: 80 euros
Grabs, holds, drops, point finger...
- Actuators / output devices: 12 servos MG995, 12 Hitec 805BB
- Control method: keyboard, Joystick, Motion pattern
- CPU: Arduino
- Operating system: Linux, Macintosh OSX, Windows
- Power source: 6V 44A
- Programming language: MyRobotLab, Arduino sketch, Serialterm