



Robot Head MK2
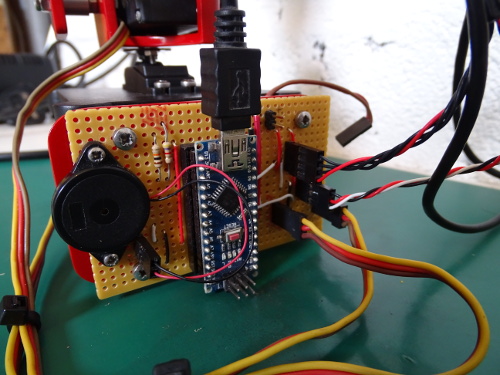
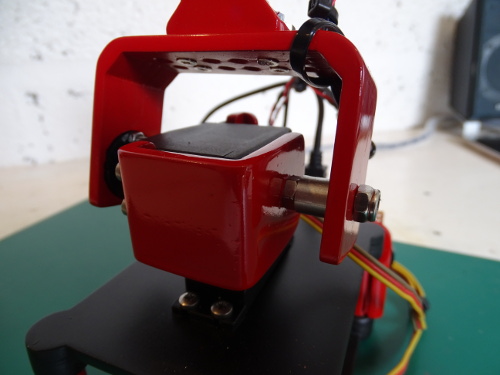
This is my latest robot project, a desktop robot head. This project has been an exercise in 3D printing and finishing/painting of 3D printed parts. The robot is simple by design and is serving as a test bed for various ideas that I want to explore. The video series following the design and build of the robot explains how the robot was built. The robot uses 2 servos to form an pan/tilt robot head that is equipped with a sonar sensor, a webcam and an RGB 'eye'. An Arduino Nano is onboard the robot to control the servos, read from the sonar sensor and drive the RGB led. Power to the servos is provided by a 6V NIMH battery and the Arduino is powered over USB. There is also a piezo buzzer mounted to the control board so the robot can also generate some sounds and tones as well.
Some pictures of the finished robot below:


The lastest video in the series https://www.youtube.com/watch?v=saQgSB4QPHU&t=27s covers the software running on a pc that is doing the high level control of the robot and the machine vision. I am using wxPython to create the GUI.
Desktop Robot, Machine Vision
- Actuators / output devices: Servos
- Power source: 6V
- Programming language: C and Python
- Sensors / input devices: sonar, camera
- Target environment: indoors