



Robot Cat Quadraped (In Progress)
Robot cat started out as a sketch-up model to work out the dimensions and get a feel for how i could mount the servos together an soon turned into quite a complicated project its a work in progress an quite slow moving due to the quantity of custom parts.
i have included the model and pcb files in the attachment 'robot cat files 1.zip'


The Servo body is made from 25mm aluminum box section



it took about 3 hours to build the first one of these hip joints i cut 2 of each part so i can hopefully use them as a template

i will use a 6800mah lipo battery eventually as shown in the sketchup model but for now the nicad will do for testing mockup purposes
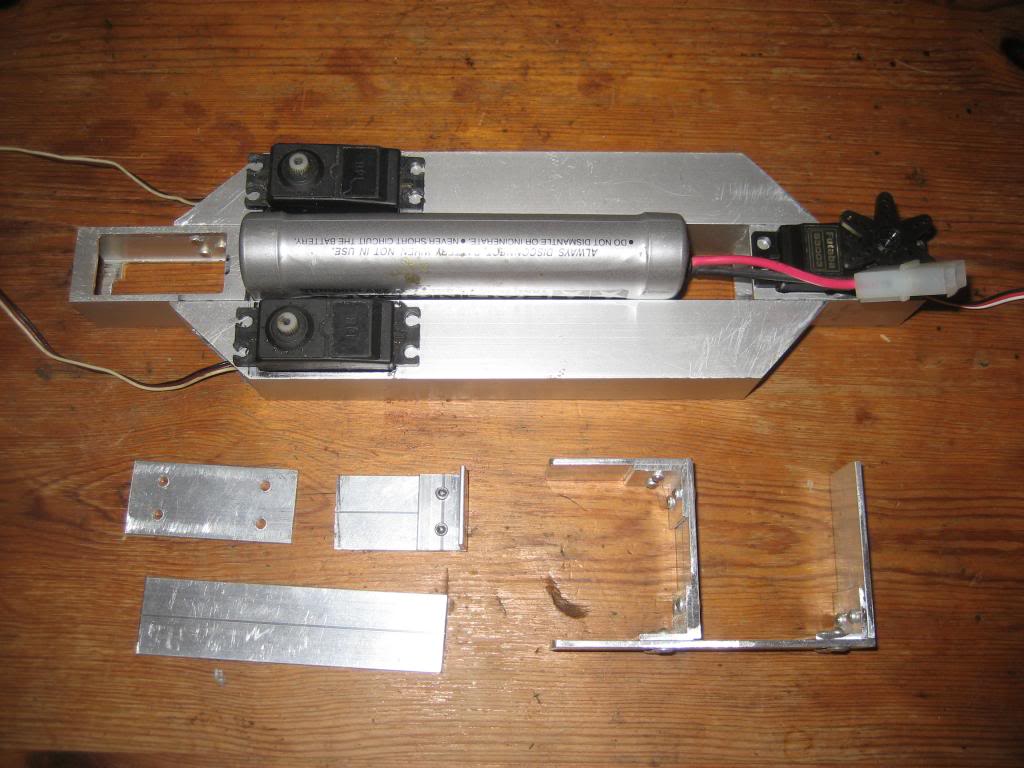
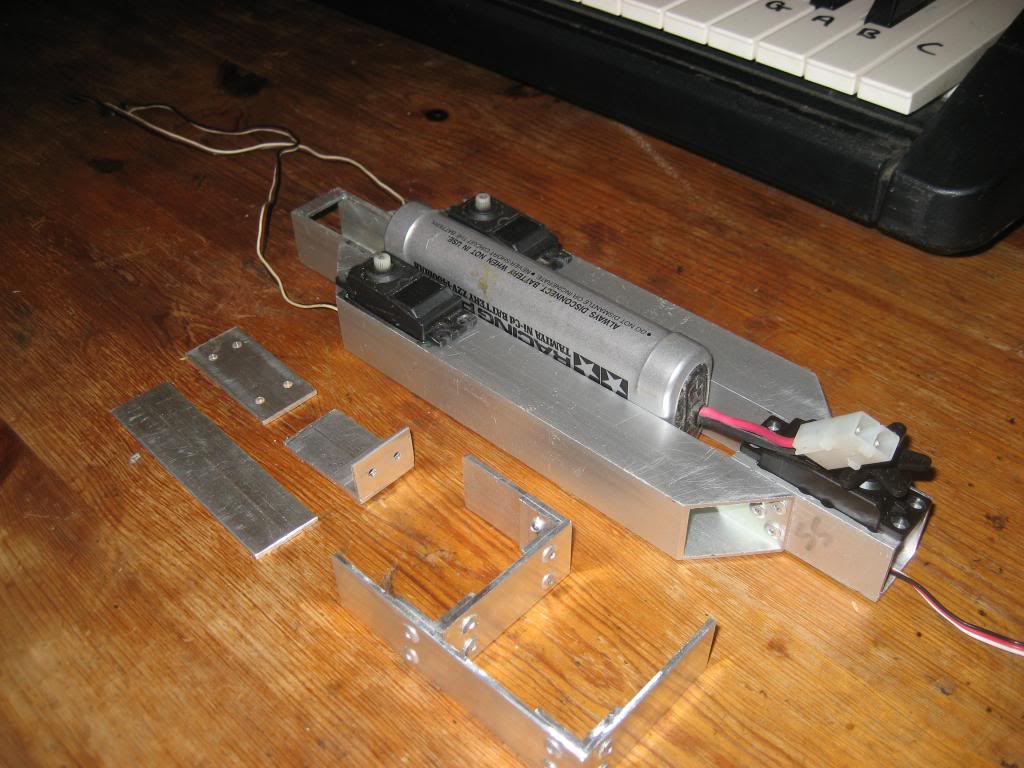
 the body and hip servo joints coming together
the body and hip servo joints coming together

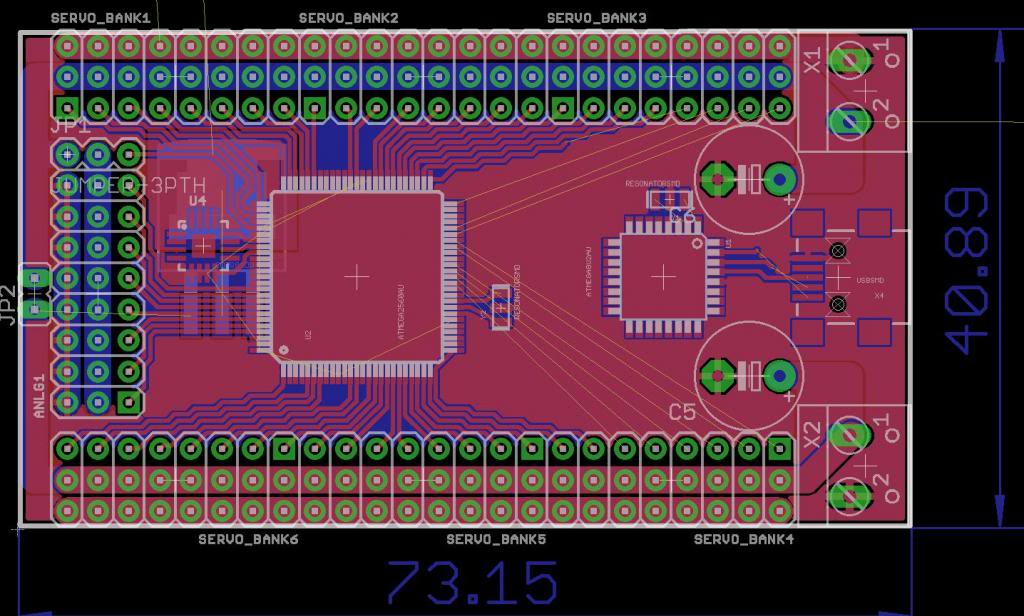
i have included the eagle files for my 48 servo controller using an atmega 2560 microcontroler it is unfinished at the moment but if you want to have a look you will need the microbuilder & sparkfun component library's inluded in the zip file (eagle version 6.1)
as of the actual pc im not sure if i will use a raspberry pi or a via pico itx board for image recognition with open cv and ros if i can ever get my head round it
Walks Around Navigating obsticals
- Actuators / output devices: 22x Standard Size Servos, 10x Micro Servos
- Control method: Autonomous Or Bluetooth / WiFi Control via laptop
- CPU: atmega 2560 & Raspberry Pi / Pico ITX
- Operating system: Debian GNU/Linux
- Power source: Lipo 6800 mAh
- Programming language: Arduino
- Sensors / input devices: ultrasonic, Reflective infared distance sensor
- Target environment: indoor