



Robot Buggy
My First Robot
It's a simple modified RC buggy, designed to follow light.
Picture (Before the Tragedy)

TRAGEDY!
I was having Test Run, suddenly it missed light and baang into the wall! The front tire broke! As you can see from the picture, the front bumper is already broken, the tire directly hit the wall and broke. For your information, this RC Buggy is about 10 years old, lol. Yeah, it is my elder bro's. I asked him if I could make Robot out of it, he said, yeah why not. I don't have enough money to buy new RC car. Here's the broken tire picture

So what did I do?
I didn't have money to buy new RC car, so I had to make my own steering mechanism. I had servos(small ones) I don't know but they don't seem to work with my Arduino Mega, they do, but they are very slow. I had posted onto Arduino Forums, but the problem is still unsolved. So I used High Torque Motor that I bought from Sparkfun.com. I mounted the wheels onto this High Torque Motor. For turning I calculated the time taken for the DC motor to rotate about 45' degrees, it was around 200ms. Through this, I was able to determine the position of the motor. I know, if the current drops, it won't rotate 45' degrees. I know this, but I didn't have any other choice. It works!
Here are the pictures of new Steering Mechanism.


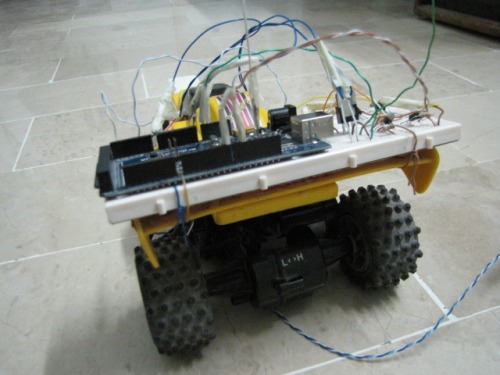
Looks like a futuristic buggy right?


This is my first ever Robot, I know it's messy, all the wires running around, sorry for the mess :)
If you see the video, the buggy can't get the light when it's far from it .This is not a bug or fault. I intentionally did this, and it only moves forward, when it detects light on either side. When the light is balanced, it stops.
Follow Light
- Actuators / output devices: RC Buggy
- CPU: Arduino Mega
- Power source: 6 AA batteries (Two 3 pairs in Parallel for increased current) and 9V battery
- Programming language: Arduino C++
- Sensors / input devices: Two LDRs
- Target environment: indoor