Robot beds with UWB indoor navigation
We have made a pair of robot beds to roam around with sleeping visitors at a gallery: http://www.loligo.se/roaming_beds/. Building the robots was a challenge itself, even more so designing an indoor navigation system with enough precision to enable choreographed dance. We ended up using a combination of ultrawideband radio (UWB) and good old odometry. Lidar is used to avoid moving obstacles such as humans.
An unexpected problem was that the wheels came from different production batches with different hardness. One of the beds has a lucky wheel combination and goes straight. The other one turns slightly to the side when unloaded. With a passenger on-board the wheels are compressed differently and the bed turns slightly to the the other side. Luckily our home made Arduino compatible UWB based indoor navigation system (https://hackaday.io/project/7183-lps-mini) is precise enough to compensate for this!
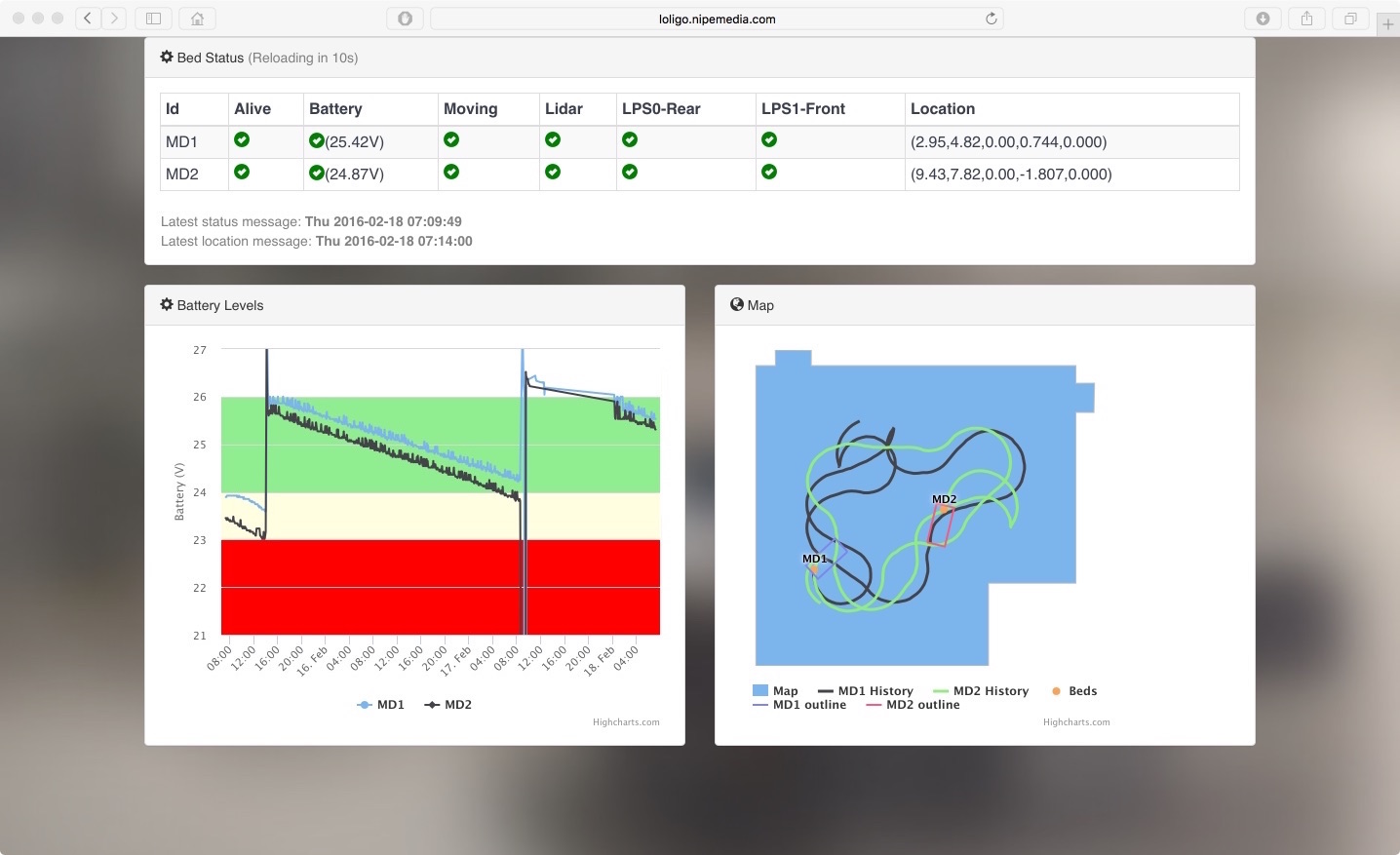
Here is a screenshot of the bed user interface: /uploads/g/n/gn/imported/bed_ui.jpg