


RG2
New Video 8-24-14
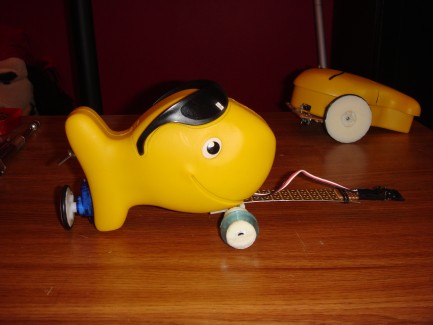
RG2 combines several ideas i have been thinking about for a few years.
With one CR Servo it can go forward or turn left or right. And by using it's one sensor it can find and follow a line using a ATtiny-85 for a brain.
The key is the wheels with one way clutches in them. One only turns clockwise the other only counterclockwise. So when the drive wheel turns one wheel locks and the other moves forward. When the drive reverses the other wheel turns it pivots in the opposite direction moving forward and sweeping the sensor across the path to find the line The first Video shows the method of movement.
The second Video shows RG2 following a line. So far I have only used 2 pins of the 6 available on the ATtiny-85 controller so i will have to think of more stuff for him to do.
RG2 is my entry in the Single motor chalange.
Line Follower