



RES-Q-ME
This is my senior project. It is a search and rescue robot. it is designed to be small and remote controlled and fully autonomous. the main processor is a arduino UNO. It connects to my computer via a wireless connection by two Xbee devices. it is controlled by an app called TouchOSC on my iPod touch. the app sends data to the computer and then a processing sketch relays that data via the xbee devices to the arduino, to drive it. I made a custom interface for the app so it can control the motor driver and infrared sensor as well as the sensor resolution. it also control the angle of a servo that has a wireless camera on it, so the camera can tilt 180 degrees. the app can also turn on the head lights and take the robot in and out of autonomous mode. the robot is controlled by an arduino UNO. it has a custom shield that I made for it. the shield has a built in motor driver that drives the track motors. the robot chassis has been machined out of aluminium and holds 4 micro geared 100/1 gear ratio motors. the robot has a 11.1 vol lipo battery pack which powers the entire robot for approximately 1.5 hours. the robot has 2 tracks to move the robot around all sorts of landscape. the robot is able to navigate around objects. this robot is intended to be used in all sorts of aplications. it can preform live video inspection of almost anything, and it is considerably cheap compared to other search and rescue robots which cost around $10,000. it is designed so it can drive into small holes in rubble of colasped buildings and other debris and find trapped victims. we bought this kit http://www.robotmarketplace.com/products/IL-ANTKIT2.html and the we realize that the body was to small so then we made it bigger but still kept the tracks and motors. I made a new lexan cover for the top and the made a front and rear brush guard to help the robot get over larger objects. so far the robot is entirely built all that is left now is programing, for both the arduino and the processing application on the computer. I have attached the custom circut board that i made. it was designed using fritzing. goto http://fritzing.org/ for more info on it. I tried to use the TB6612FNG motor driver found at http://www.sparkfun.com/products/945 , but it blew up in my face. so now i am using the Serial controlled motor driver found at http://www.sparkfun.com/products/9571. this driver seams easier to use becaues i only need TX and RX pins to communicate with it. unlike the 6 pins needed to comunicate with the other driver. i am now switching from a arduino UNO to a arduino mini Pro. which is like a quarter of the size of the UNO. this will make it easier to wire up the inside of the robot because of the less room taken up by the micro-controller. Update, the 11.1 volt battery blew my motors so now I have switched to a new 7.4 volt lipo battery . This is bettery because it has a lower voltage and base more amps 450mAh now to 1000mAh. That should double the run time of the robot from 1.5 hours to about 3.25 hours. i have since switched for the serisl controller to some new drivers that I stole form some old servos. all I did was take the controller board and the pots out of the servo and then hooked up the driver to the motors on my robot. they work perfect now and they are controlled with servo signals. which makes it easier to use with my arduino. since I have switched to the new drivers i have gotten the robot to move and will post a video of it soon moving arounbd all by its self.
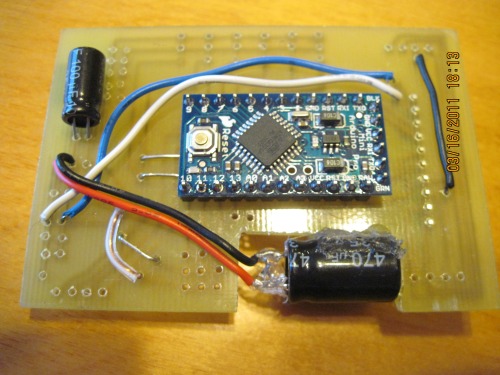
these are some pictures of the build


you can see the size difference in the three chassis


navigate around via infrared and wireless connection to computer and ipod touch.
- Actuators / output devices: 4X 100/1 ratio micro motors, micro servo, medium servo
- Control method: Auto/ Manual
- CPU: Arduino Pro Mini 5V/16MHz
- Power source: 7.4V 1000mAh lipo
- Programming language: Arduino Processing
- Sensors / input devices: Sharp GP2Y0A21YK0F IR sensor
- Target environment: indorr and outdoor