


repBug, 3d printed hexapod
Hello everyone !
After spending more than a year tinkering with my 3d printer, I am finally moving on to printing some fun stuff: hexapods!
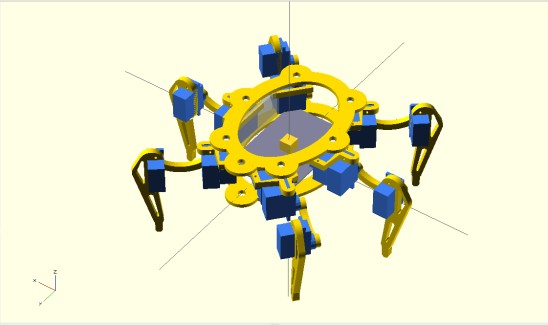
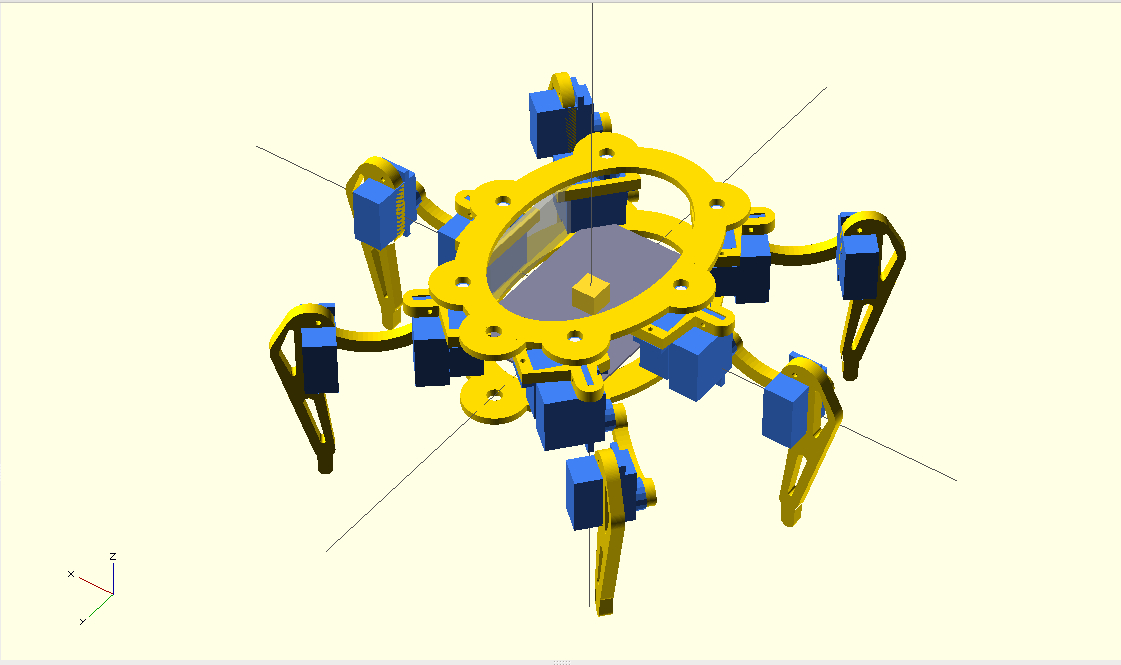
So these are the very early stage of repBug a reprapped mini hexapod:
Some features:
- open source design (will post the link to the github repository soon)
- parametric (modelled in openscad)
- relatively cheap (<200 euros, all included, hopefully)
- showcase the advantages of 3d printing
Some more details :
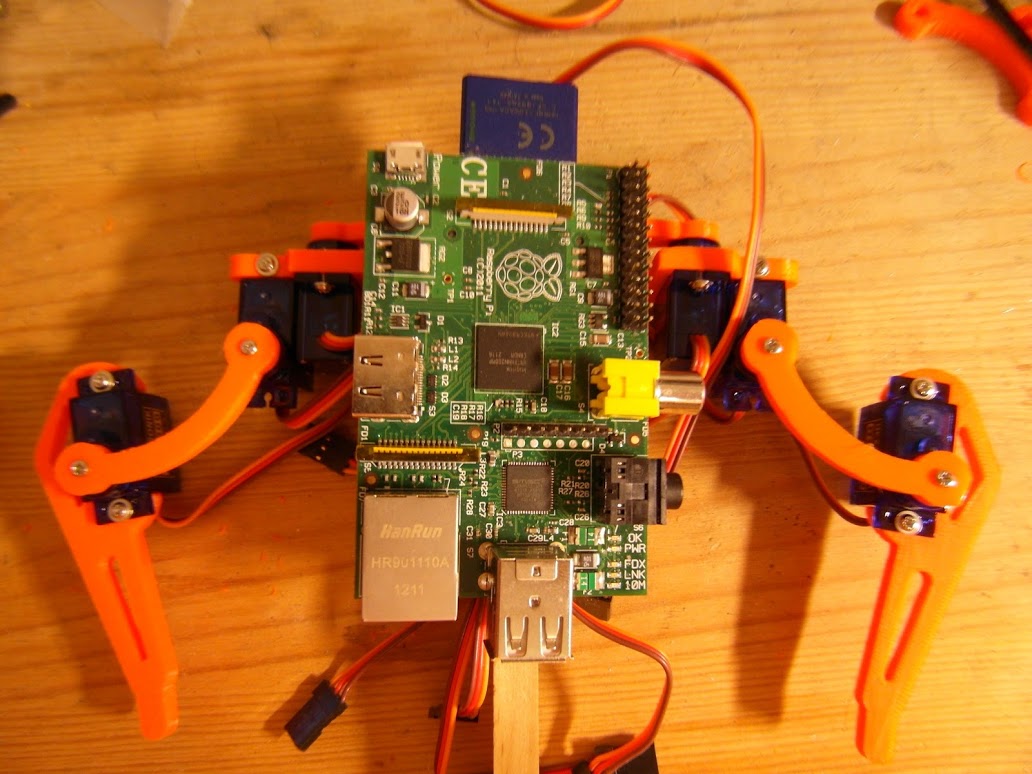
- muscle: HXT900 micro servos ->9 grams each (X21)
- brain : RaspberryPi or BeagleBone -> 30 g
- skeleton: small 3d printed parts (PLA plastic), sturdy yet light ! -> 10 g per leg
- eyes: small cheap chinese webcam , without casing ->3g
Overall design (far from final)
Update 02/09/2012
First print tests :


Update 10/09/2012
3d printed parts
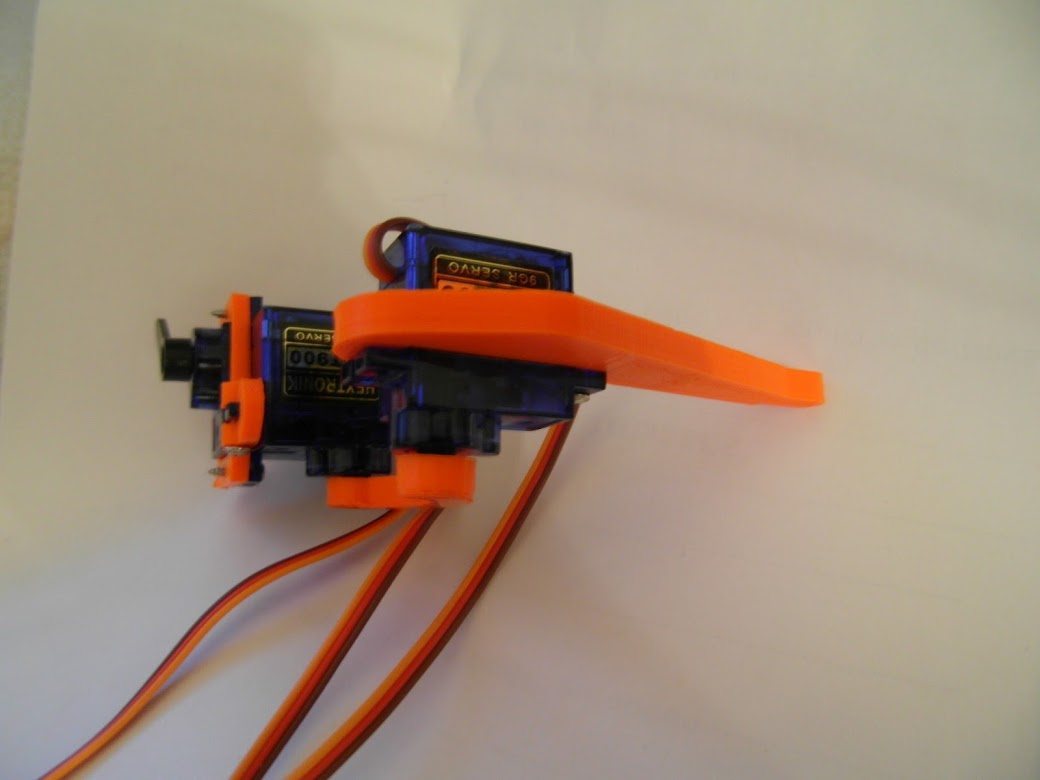
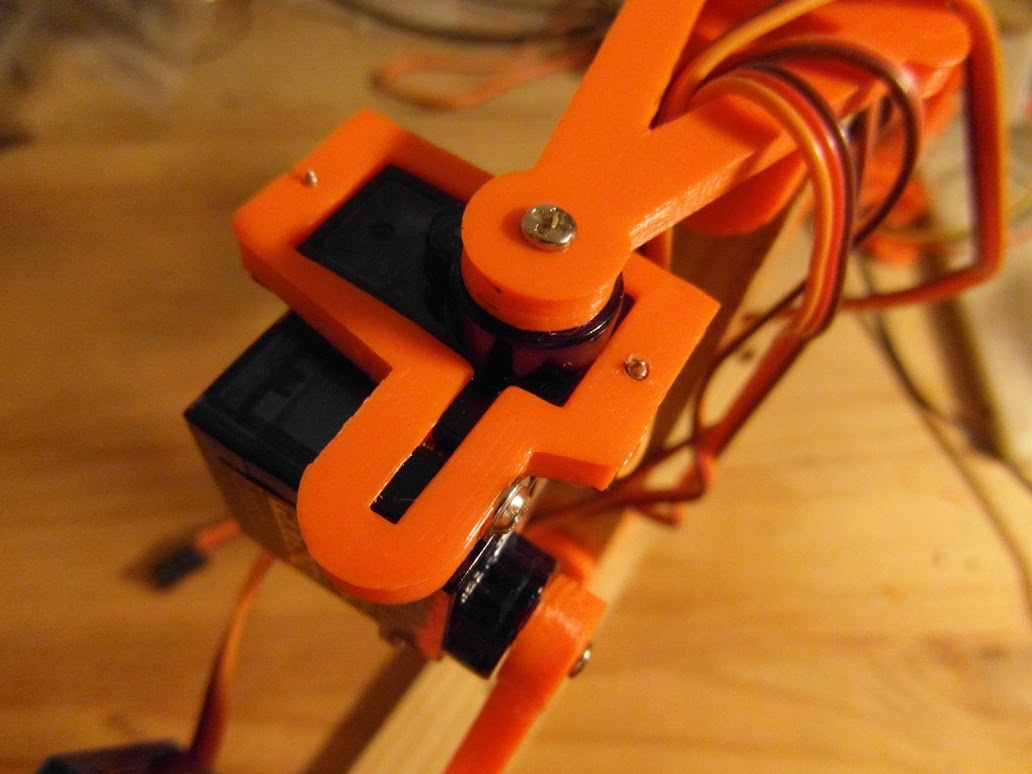
- I moved on to fully 3d printed servo couplings: all the parts that would require servo horns have now a toothed inner profile, and it works !! So this means : no more forcing leg parts onto shaft and damaging them, aswell as a lot of weight and complexity gained !
- redesigned /refined almost all the parts, making them as lightweight as can be, while still keeping them sturdy (usually 5 mm thick)
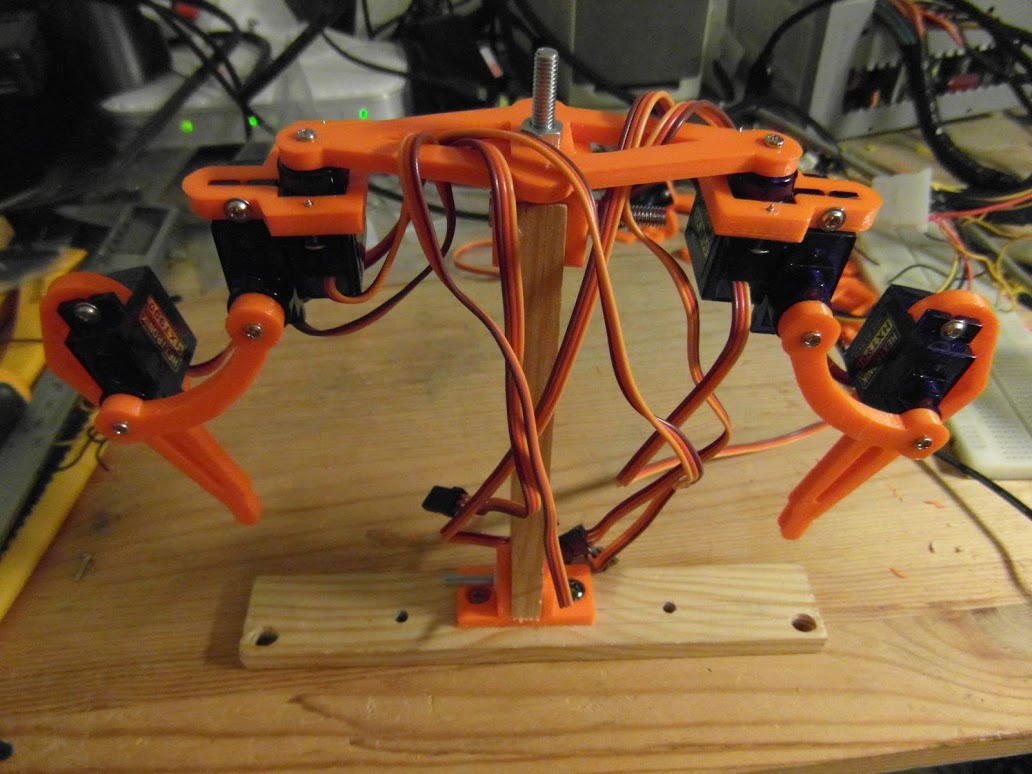
- created and printed a "testing rig" : just a few printed pieces and a piece of wood, to suspend a leg duo for movement tests
Electronics:
- in the pictures you can also see the RaspberryPi that is going to be used as "brains" for size reference
- instead of going with a Pololu Maestro
(http://www.pololu.com/catalog/product/1356)I decided to use two +Adafruit Industries 16-Channel PWM driivers (https://www.adafruit.com/products/815)
while this will take up a bit more room, and will require more hand tuning it gives me 32 channels for half the price !
- had a very big "do'h" moment when I realized I don't have enough rigid cables for prototyping even two servos :)



- Actuators / output devices: HXT900 micro servos
- CPU: Raspberry Pi
- Operating system: Debian GNU/Linux
- Power source: still power supply cable
- Sensors / input devices: pressure sensor, Ping Ultra sound
- Target environment: indoor, outdoor