



Remote controlled Rover 5 Robot
I have a rover 5 chassis (4 motors, 4 encoders). My goal to use this chasis to create a robot that drives around and is controlled by a remote.
I am new to robotics and I am unsure about how to assemble my robot chassis / what to do next. After discussion I have decided to use an Arduino Uno with this remote.
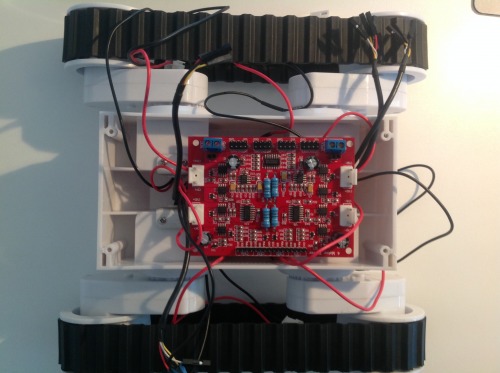
I already have the board pictured here as well as the Arduino Uno.
My Arduino Uno is the one pictured below:

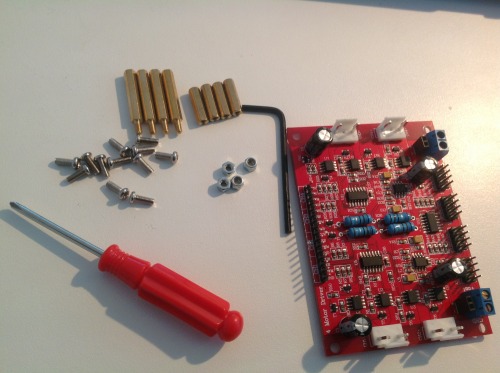
I recieved the following parts, along with the chassis itself and a battery holder capable of holding 6 batteries (total 9V)
I am now in the process of connecting up the motors with the motor driver and the Arduino Uno as mentioned on this comment, and as below:
- Connect a PWN pin on your Arduino to each pin on the board that says PWM.
- Take A regular digital output on the arduino to each pin marked DIR.
- (Optional) Take Analogu inputs on the Arduino to each pin marked CUR.
- Tie the ground and 5V of the arduino to the board. (top right by the Motor 4 output)
On the Arduino forum page, I have recieved the following advice on how to assemble my Rover 5 with an Arduino Uno
I have also been given an example code to get me started, that does not use the CUR pins or encoders, that 'should drive the robot around and give you [me] a place to start."
Click here to see the original comment with the code.
I have begun on this path, and I have already connected the PWM and the DIR pins to their locations as mentioned above.
Thanks in advance!
Drives around controlled by a remote.
- Control method: remote
- Target environment: indoors mainly