


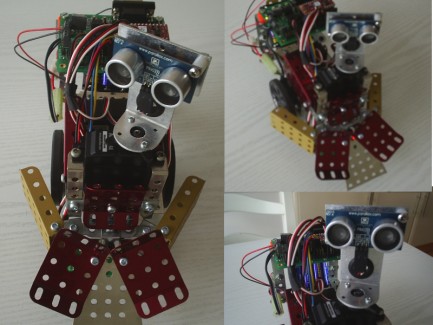
Rebel, first attempt at building a robot.
This is a first attempt at building a robot. For now it is able to follow a line, and to drive around free with obstacle avoidance. In the near future I will program it to follow someone/thing, and in the far future I will try to let it solve a maze. ie. find it's predefined goal in a maze. The programming bit wasn't the hardest for me as I am studying Computer Science. It was the electronics that I really had to dive into. But in the end that was also not the hardest. I really enjoyed building my first robot and I think many will follow.
The parts that I used for this robots are:
- Mini Bot Board II
- Atom Basic Pro
- 2x Continous rotation servo
- 1x 180 degree servo
- Ping))) Ultra Sound sensor
- Tracker sensor (3x Infrared sensors)
I am already busy in designing a wooden chasis for it. So the Rebel II is already being desinged. I hope I can soon upload some videos of it running. Also I will make the source code available if someone is interested.
Tell me what you think of it? some suggestions for improvement, critisism, all is welcome.
UPDATE:
added 3 videos. In the first video rebel is following a line. In the second one it is navigating around and avoiding obstacles. In the third video, at the end, the batteries fell off and he dragged his guts around :P
Line following, Driving around free with obstacle avoidance
- Actuators / output devices: 2x Continous Rotation servo's for wheels, 1x 180 degree servo for controlling
- Control method: Full autonomous
- CPU: Atom Basic Pro on a Mini Bot Board II
- Operating system: AtomBasic
- Power source: 9 Volt for powering the board, 4x AA (1.2V) for powering the servo's
- Programming language: AtomBasic
- Sensors / input devices: Ping))) Ultra Sound, Tracker Sensor
- Target environment: indoor