


RBS Tadpole with Encoders
Introduction
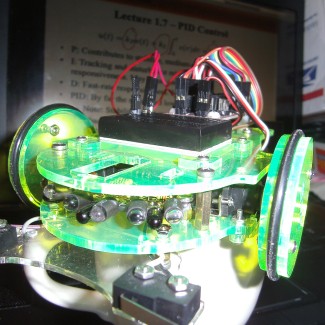
I am using a Rocket Brand Studios Tadpole as a platform for experimentation. I'm taking the Open Robotics University Control of Mobile Robots course, and I wanted to try implementing some of what I am learning.
Features
The Tadpole can be ordered with various options and add-ons, but this is how I outfitted mine.
- Laser cut acrylic chassis
- Two DC gearmotor differential drive
- Optional wheel encoders (hall effect sensors with 8 ticks/revolution)
- Analog IR obstacle sensor (6 IR LEDs and 3 IR sensors for left-center-right measurements)
- Arduino compatible MicroMagician robot controller (similar to an Arduino Pro Mini, but with features noted below*)
- Supply voltage from 4.5V to 9V with 3.3V regulator and reverse polarity protection*
- ATmega168 or ATmega328 MCU at 8MHz*
- Dual 1A FET “H” bridge with electronic braking, current limiting and overload detect*
- 3 axis accelerometer with 0G detection and either 1.5G or 6G full range sensitivity*
- 38KHz IR receiver with signal detection LED*
- Up to 8 servos can plug directly into the controller when V+ is set to Battery*
- 3.3V and GND outputs available for powering sensors*
- All I/O pins (except D4) have both male and female header pins*
- 4xAAA batteries for power
Software
I'll post code I develop here, and anyone is free to use it. I started from the example programs provided by Chris the Carpenter.
- Tadpole_Mobile_Robot_Testbed_v1: Includes obstacle avoidance (RBS IR sensor), drivestraight function using DAGU encoders. Next step is connecting the bumper switches.
I also just learned that there is a PID Library for Arduino. How easy is that? I have to download it and give it a try!
Mobile test bed for my Control of Mobile Robots grad course
- Actuators / output devices: Two DAGU
- CPU: DAGU MicroMagician
- Power source: 4xAAA alkalines
- Programming language: Arduino C++
- Sensors / input devices: 2 bump switches, DAGU Simple Encoder Kit, RBS IR sensor, on-board MicroMagician accelerometer
- Target environment: indoors