


RB-9 RROS-based Robot
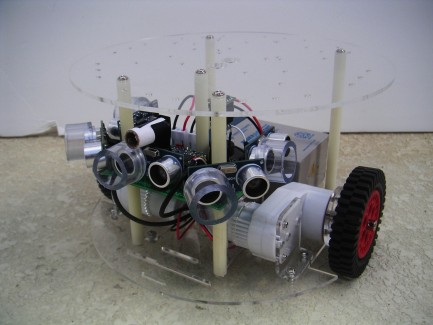
This robot was built using the RB-9 chassis available from RobotBASIC.org. It is powered by a RROS-based PCB that uses 5 ranging sensors to create a Virtual Sensory System (VSS) that includes 4 bumpers, 5 proximity sensors, and a turret-ranger). It also supports 3 lines sensors, a compass, a beacon detector, and battery monitoring. The video points out the major parts, and shows how easy it is to program this robot by explaining a simple application where the robot finds and moves to objects that are close by. Complete information about the RROS can be found in the RROS User's manual that can be downloaded here: http://robotbasic.org/resources/RROS_Users_Manual.pdf Appendix E of the manual provides the full source code for the application shown in the video. The abundance of sensors on this robot means it can be used to create far more applications and behaviors than robots that only have a few sensors.