



Ratchet the MVPD
Ratchet is to be a Mobile Virtual Presence Device (MVPD). To achieve this goal he utilises a mobile phone to afford capability for 2 way audio, video com's. The use of a mobile phone also enables Ratchet with a MARG Sensor array for localisation capability. In addition to these sensors Ratchet also has 2 * Sharp IR sensors for rudimentary obstacle avoidance.
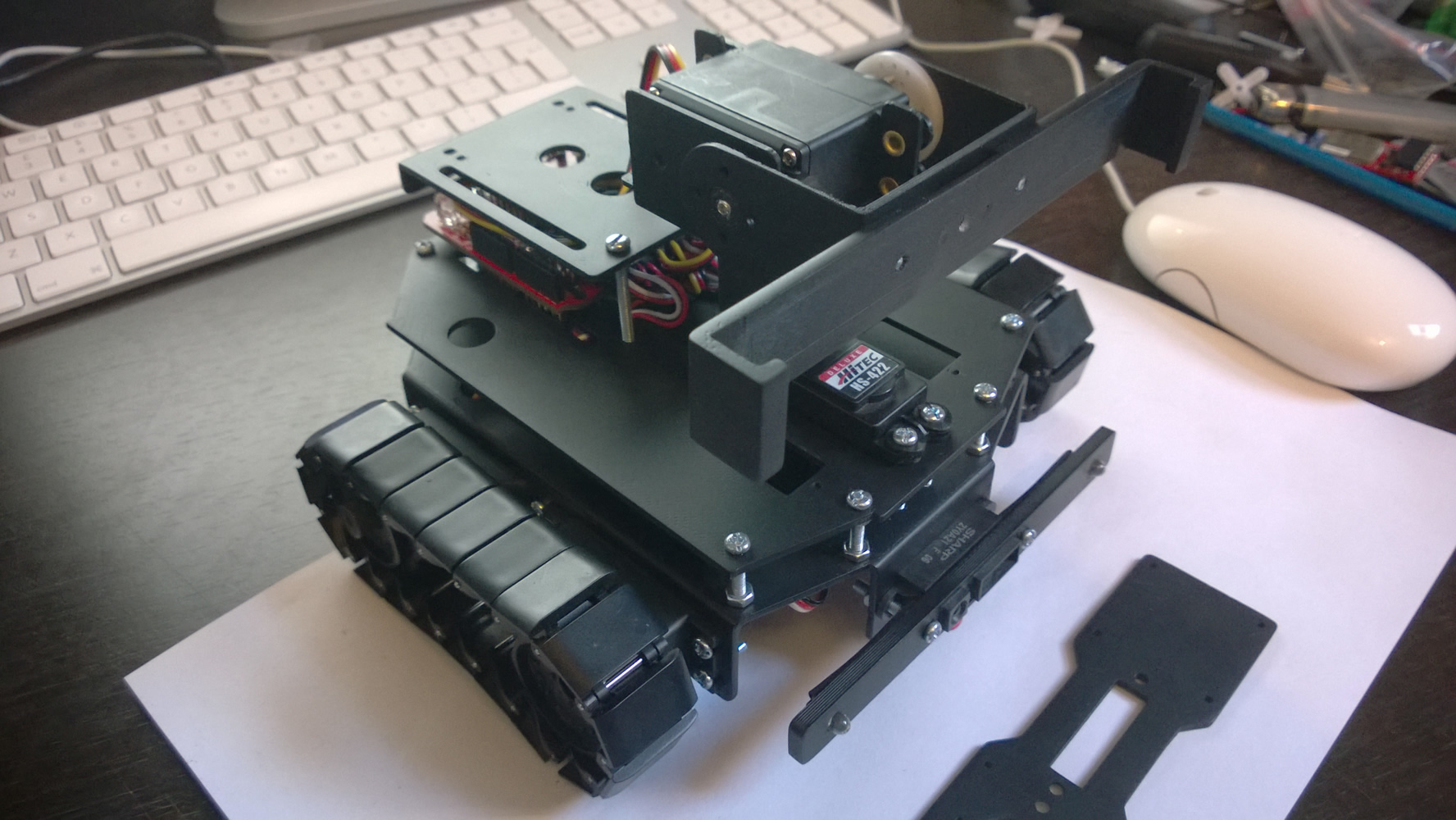
Figure 1: Ratchet Without Phone
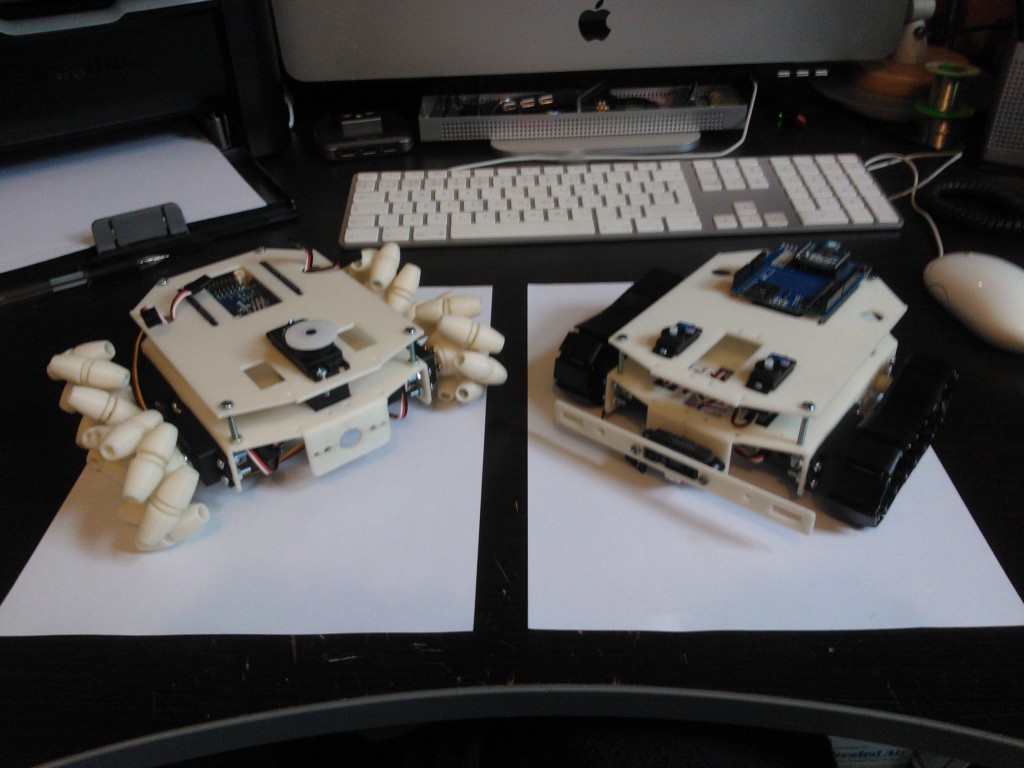
He is the first robot I have put together using a 3D Printable robotics kit that I have been developing for a while. With the exception of the tracks all of Ratchet is 3D Printed. The following image shows the kit in two versions, Ratchet on the right, and Clank (my next build to be) on the left.
In order to provide Ratchet with servo connections and power distribution I developed a simple shield, the Servobot shield. The Servobot shield simply duplicates the functionality of a quadcopter power distributor board whilst also breaking out an additional six digital pins which can be connected to via servo plugs.
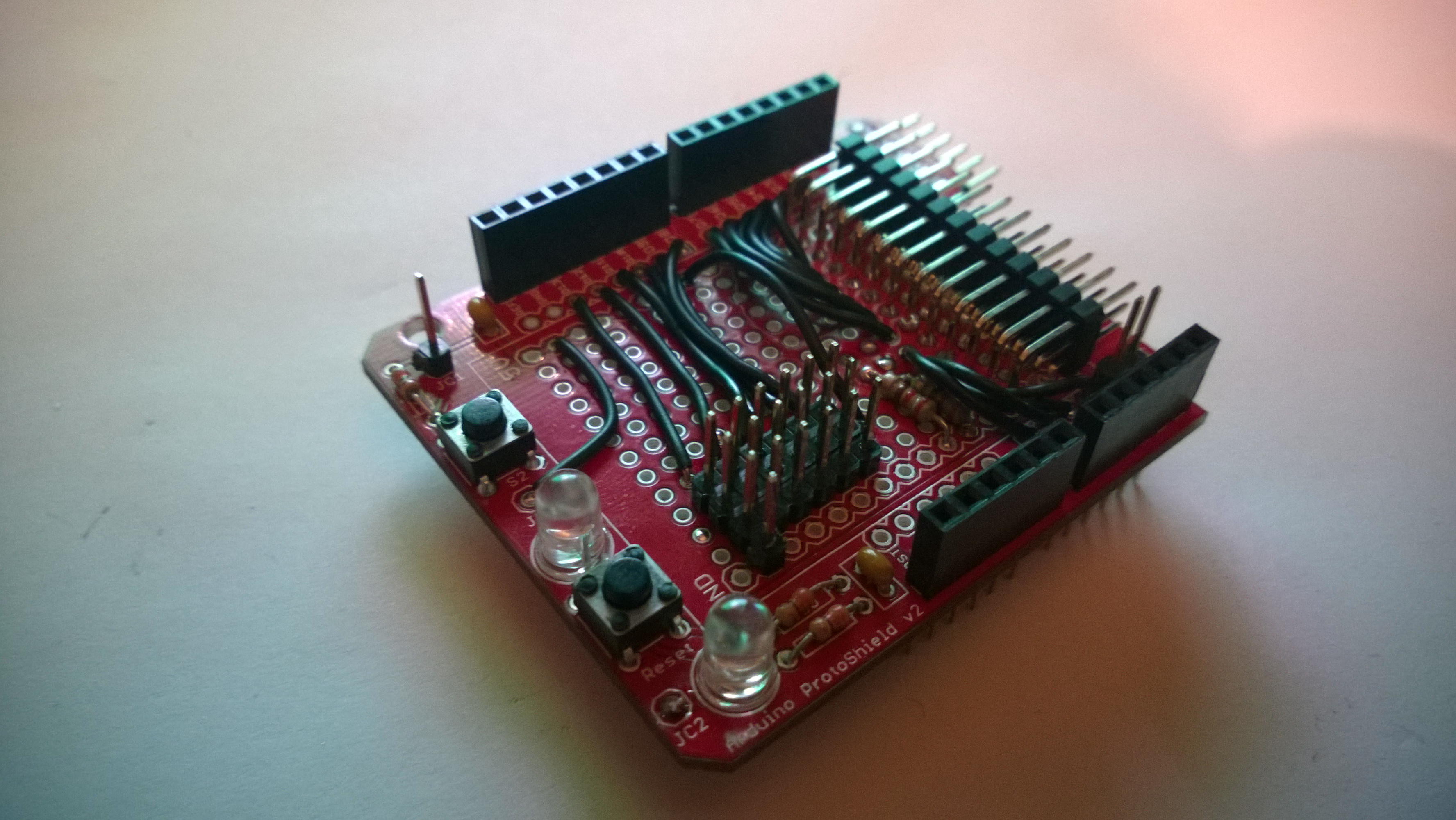
Figure 2: The Servobot Shield
This affords capability for the connection of a 6 channel RC receiver,or simply just servo style powered connections for components such as sensors or LED’s. Also, thanks to using a Sparkfun ProtoShield Kit for the body of the design, provision for a BlueSmirf Bluetooth connection is also afforded. In the same manner as with the aforementioned six digital pins, the board also breaks out four of the Arduinos analog pins to allow them to be connected to via servo style connection heads.
More info on the shield can be found here.
I am currently at the coding stage and am working on a Unity3D based application that will enable cross platform control. This is going well and I have completed a serial com's solution for Unity which can be found here.
I have a few basic videos of various development stages that can be found here and I will update this page to include some video as soon as I have got a nice one of him in motion done.
A Mobile Phone based Mobile Virtual Presence Device
- Actuators / output devices: Maximum of 6 Servos
- Control method: autonomous, Bluetooth, WiFi, semi-autonimous
- CPU: arduino pro 5v
- Power source: 8 * AAA
- Programming language: C, C# Mono, Unity3D
- Sensors / input devices: 2 Sharp IR, MARG Sensor Array, Phone Camera
- Target environment: indoor on smooth surfaces