



ratb0t
I´m using an Arduino Diecimila to control the steering servo and the traction motor.
The XBee module recieves data from another Arduino, this one has a wii nunchuck controller attached.
Next Step: make it autonomous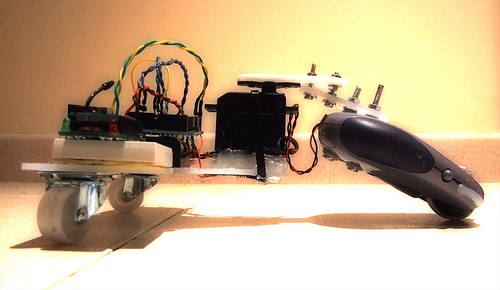
Update: 31 Jan 09
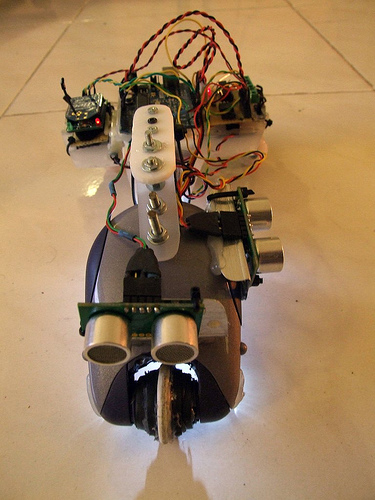
I´ve added two ultra sound sensors and now I´m trying to make this bot a wall racer. Due to its drifting capabilities its being very hard to code this, but I will find a way.
I´ve replaced the 4 AA batteries by a small 7.2V battery and now he has more power wich also means more nerves.. :D
…
So, after a couple of hours of trying and trying, I quit, and decided to relax and enjoy some drifts.. :]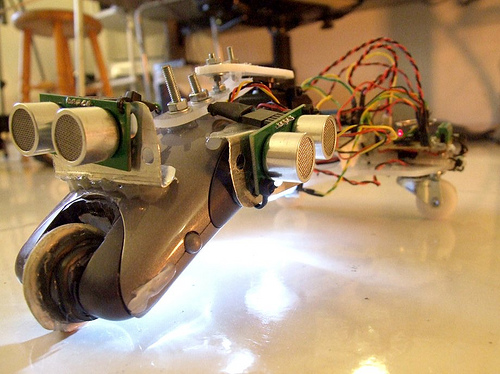
Update: 5 . Feb . 2009
my first attempt of making this bot autonomous.. obcessed by walls… a wall racer!
slow for now… next time will be faster
just added one more video
Update: 6 . Feb . 2009
new video with another attempt :)
Wall Racer or RC
- Actuators / output devices: servo, Braun Silk Epil (Hair Removal)
- Control method: RC or SRF05
- CPU: Arduino
- Power source: 7.2V
- Programming language: C
- Sensors / input devices: RC or SRF05
- Target environment: indoor