



RastKad4
This is the first robot of Bilal, one of my students. He wanted to build a robot without any programmable circuit nor connection to a computer.
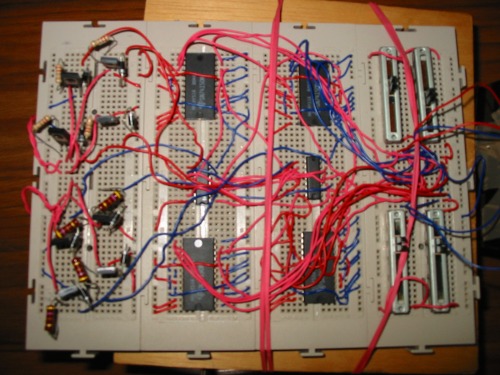
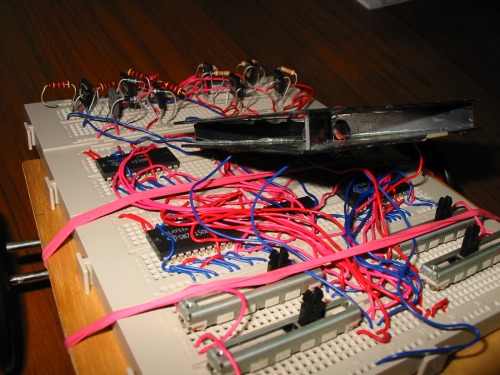
It uses four SN74150 (digital multiplexers of 16 inputs) to take decisions, and some logic gates.
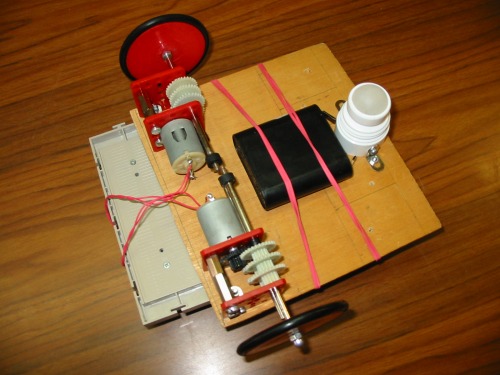
It has 4 LDR sensors to sense light in any horizontal direction.
Two wheels attached to two geared motors and a custom ball caster -made of a roll-on deodorant-.
Unfortunately it doesn't work. There are a lot of connections in the breadboards that fails sometimes.
The next step is to substitute the circuit blocs that works properly with perforated printed circuits.
Follows light
- Actuators / output devices: 2 geared motors
- CPU: only combinational digital circuits
- Power source: 5V, 2x 4
- Sensors / input devices: 4 LDR
- Target environment: indoor, flat surfaces