


Raspberry Pi 6 Wheel Drive Rover
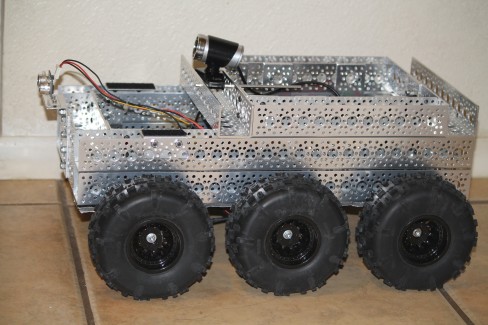
This is a 6 Wheeled Drive Robot Rover it is 18" Long 9" wide 15" wide if you count the wheels And 8" High it is powered by a Raspberry Pi with 3 L298N Motor Drivers and a Adafruit servo Hat . It is Controlled with a wireless keyboard or autonomous with a HC-SR04 ultrasonic Distance sensor or a light Follower sensor module. it has a web cam with streaming video and motion detection via CpenCV.It also has numerous sensors including A ADS1115 analog to digital converter, MPU-6050 accelerometer, HMC5883L digital Compass. DHT-11 digital temperature and humidity sensor and a BMP280 barometric pressure and altitude sensor. I'm in the Process of building a custom pan tilt unit with High torque servos that ca
n handle the weight of my web cam and I am working with voice recognition for verbal control. In the near future will be adding a GPS module.
Many people think you have to use a Aduino with the Raspberry Pi to do the simple and continuous work but the Raspberry Pi can do everything that a arduino can do and more, but since the Raspberry Pi has no analog pins a analog to digital converter is required. The arduino is a great Micro-controller. but with the Raspberry Pi you can write one program that will combine all of the features that you want for a complex robot.
I first started out building Arduino Robots. But after I built a few of them there was little challenge left. So now I strictly use the Raspberry Pi. I like the fact that you can have the robot take verbal commands and says preprogrammed responses.And
with the Raspberry Pi camera module or web cam you can make it see,that is one thing that the Arduino do. It just does not have the resources to do video.
the Robot is controlled with 3 L298N Motor controllers and I had to use 6 , 313 RPM HD Premium Planetary Gear Motors.
.I tried to use standard motors but they did not have enough torque to turn the Robot. I ran just fine going foward and reverse but could not turn with the standard motors. the motors I chose have 4X the Torque as the Standard Motors.
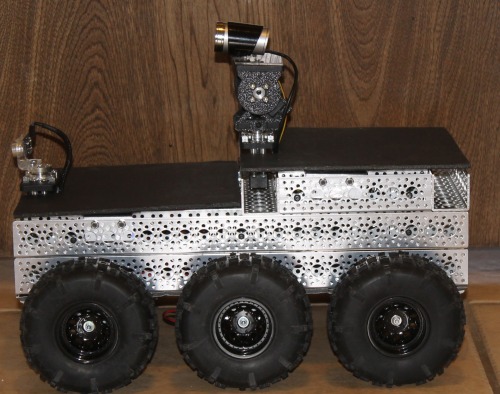
Side View Second Stage
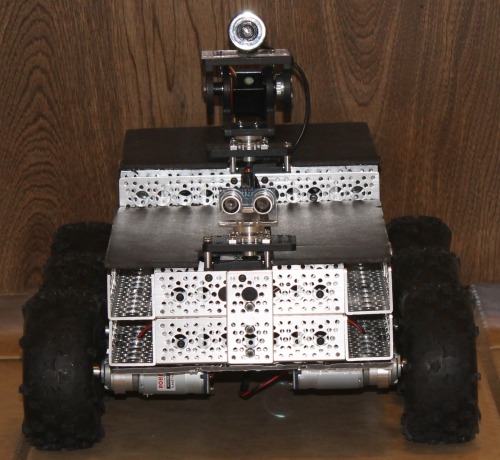
Front View Second Stage
Right now i'm in the Process of designing and Building a 4DOF Robotic Arm I want to Install quick disconect latches so I can make it easy to take on and off.
Obstacle Avoidance Via Ultrasonic sensor and Remote Controll Via Web App and Wireless Keyboard Control.
- Actuators / output devices: 313 RPM HD Premium Planetary Gear Motors
- Control method: Autonomous and remote controlled
- CPU: Raspberry Pi 3B
- Operating system: Raspbian
- Power source: 14.8V Li-ion
- Programming language: C++, C, Python
- Sensors / input devices: GPS, HC-SR04 Ultrasonic distance sensor
- Target environment: outdoor, The Moon Mars Rover