


Range seeker
Project description:
The robot should be able to walk on its own, and always seek towards the point with the longest distance infront of it. If trapped inside an alley, its should turn around, continue to walk.
Part list:
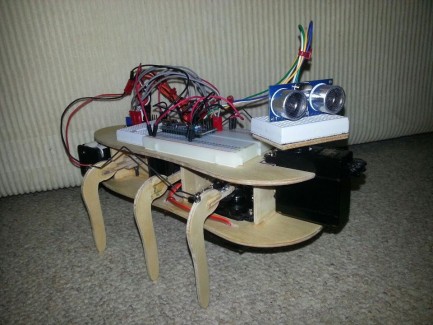
3 Servo Hexapod
360 degree turn Servo
HC-SR04 (Ultra sound range sensor)
Pololu Micro Servo controler
Arduino Nano (ATmega 328)