


QwerkRover
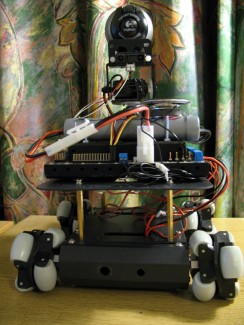
This is the fusion of my old Qwerkbot project and a 4WD base, with omniwheels replacing the originals. I've also attached one of Oddbot's compound IR sensors for better object tracking.
Details of my (slow) progress can be found on the blog listed above.
Latest Update: finally implemented (stationary) pan/tilt object tracking! (See video)
Web-controllable Telepresence
- Actuators / output devices: speaker, green and red LEDs, 4 geared motors
- Control method: autonomous / semi-autonomous / user-controlled all over wifi to host PC.
- CPU: 200 MHz ARM9 RISC processor (onboard); remote PC
- Operating system: Linux (onboard), Any java-capable OS (host PC)
- Power source: 7.2V 1500mAh RC battery
- Programming language: Java, Processing
- Sensors / input devices: USB webcam, DAGU IR Compound Eye
- Target environment: indoors