


QwerkBot
Latest Update: New 4WD base with omni wheels- see new 'QwerkRover' project!
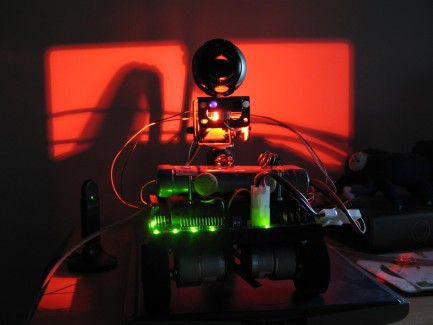
My first robot. I added a couple of features to the "Qwerkbot+" recipe- a sharp IR distance sensor for input; a couple of ultrabright LEDs for at-a-glance status indication; and a loudspeaker for audio playback. The base had two wheels for differential drive, plus a castor to balance. The webcam and IR sensor are then mounted on a pan/tilt unit (two servos).
Programming projects on this configuration included edge-detection for static object tracking; collision avoidance for autonomous roaming; and cliff avoidance for driving around on tables.
I maintain a 'blog at the address linked above, with details of my latest hardware build and coding progress.
Web-controllable roaming camera; autonomous object tracking / obstacle avoidance with IR
- Actuators / output devices: 2 geared motors, green and red LEDs, speaker.
- Control method: wireless networking for control over internet (user) or by java programs on a PC (autonomous)
- CPU: 200 MHz ARM9 RISC processor (onboard); remote PC
- Operating system: Linux (onboard), Any java-capable OS (host PC)
- Power source: 7.2V 1500mAh RC battery
- Programming language: Java
- Sensors / input devices: Sharp IR GP2D12, USB webcam
- Target environment: indoors