



Quadbot - [FROG]
UPDATE(2011,JAN,1):
Change to Arduino MEGA. Distance sensor, laser module, 2nd switch regulator, Two 10mm RGB LED and relay had been added on new face plate. Mechanic part has 100% done for now but programming still lots of work to be improved. However I am gonna mark it as 100% done and not update this robot anymore. Don't wanna keep same robot on home page over and over again. But I will post related updates in forum since I am sure I will have lots of problems while programming this guy. Drop me a line if you have any suggestion or ideas, I'll be glad to hear any voices. Thanks! BTW, Happy 2011 to all LMRers.
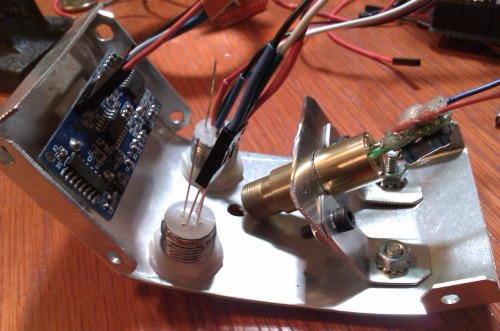
New face plate and components.

New plate installed.

Two 6 Switch Regulators and external 3.7V lipo for LEDs only.
Motion sensors in the ass...:P because its to sensitive and noisy.

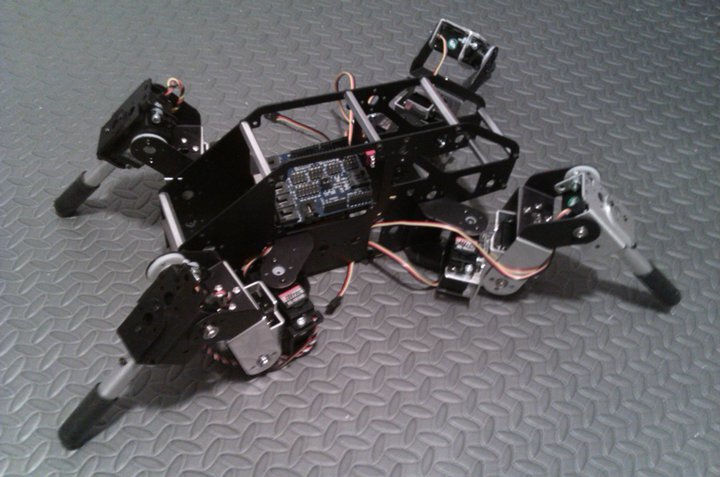
Each of front leg has SHARP distance sensor below the knee.
UPDATE(2010,DEC,12):
Greeting to all LMR friends and wish you all have wonderful coming holidays.
I have been working on the "walking" progress of my FROG. After searching around the IK programming and fooling around all forums to ask stupid questions. Kinda give up to keep asking people and decide to do it in stupid way by hard hand coding. I wasn't got too much trouble to have it turn around either right or left, the hardest part is to have it walk straight forward or backward. When the programming meet the real world is just totally different story.
The IK math just way too much over my head but I still want to learn it even my brain is getting old. Anyway, still welcome if anyone could support any hint or better way to have my FROG walking properly. Thanks for watching.
UPDATE(2010,DEC,03):
Finally servos are all working now, add one more battery for servo board and one switch regulator to reduce the voltage from 8v to 6v. That will prevent more servos got killed(3 of them been killed in action without regulator protection). Thanks for all great friends help me in all kinds of suggestion and ideas. Forum link:
https://www.robotshop.com/letsmakerobots/node/23720
XBEE, LED indicator and buzzer has installed. Basic hardware had been installed. Few distance sensors still on the way. Video had been updated as well. Now is time to move on IK programming which I think it's a greater challenge for myself. Hope to get it walking soon. Forum about IK if anyone could help:https://www.robotshop.com/letsmakerobots/node/23741
I am new to this robot field and sorry for poor English but I will try my best ;)
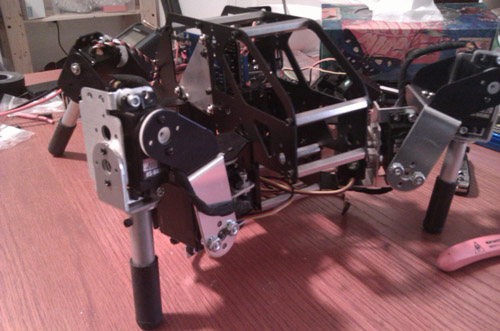
This is the bot that I use the left-over parts from Phoenix and Tetrix Mindstorm. I have played a bit Arduino and thought it might be good to give it a shoot to see if Arduino could handle complex multi servo control.

Here we go, start combine parts from lynxmotion mostly.

Most of silver looking brackets are from Tetrix which the holes are bigger than parts from Lynxmotion.
Put a Arduino and there's still planty of room for battery and other sensors.
Now I am facing the problems for servo control on Arduino. It seems not quiet right base on how I code it. I will post the code later and see if I am lucky to have someone show me the light here. However, I will keep this update. That's it for now...
Update:
Thanks for Ro-bot-X, Ezekiel181 and all people helps me. Servos needs external power, period. I have try to connect 6 servos it works perfectly as video. They move smoothly. However, I guess this servo shield doesn't like MEGA,1~9 pin doesn't react at all. so I tried arduino duemilanove and It seems working. All 16 pins shows the correct pulse from oscilloscope...
Bad news comes... Stupid me!!! I connected 12 servos pin in reverse(S goes G, G goes S)!!! Dame!! the power input reverse too!! (V+ goes G-, G- goes V+ that kinda stupid). Then I saw little smoke came from some where and soon I turn the switch off. I hope everything is not too late. I correct those pins and power in proper place now but the data from oscilloscope seems bad, the wave is a mess. very sad now because not sure if I kill the servo shield or arduino itself or even worse, SERVOS!! Ahhhhhhhh!!!
I just done some test now in both arduino and mega w/ ServoShield. The pulse seem the same mess. I hope just replace these two 4017 or capacitor will solve everything.
Anyone has any idea which part might damaged from situation like this?
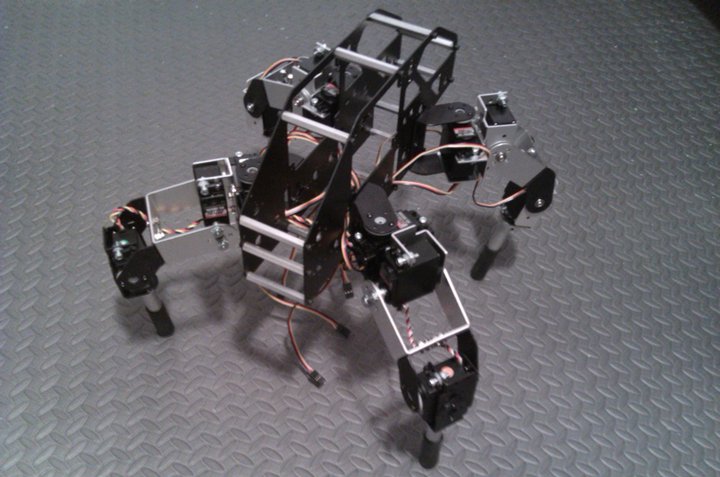
4 leg walker
- Actuators / output devices: 4 Hitec 485 servos and 8 645MG servos
- Control method: Auto & XBEE
- CPU: Arduino Mega 1280
- Power source: 7.4V LiPo 2800mAH x2 && a 3.7V LiPo
- Programming language: Arduino IDE 0021
- Sensors / input devices: Xbee wireless
- Target environment: indoor, outdoor