



PurpleBOB
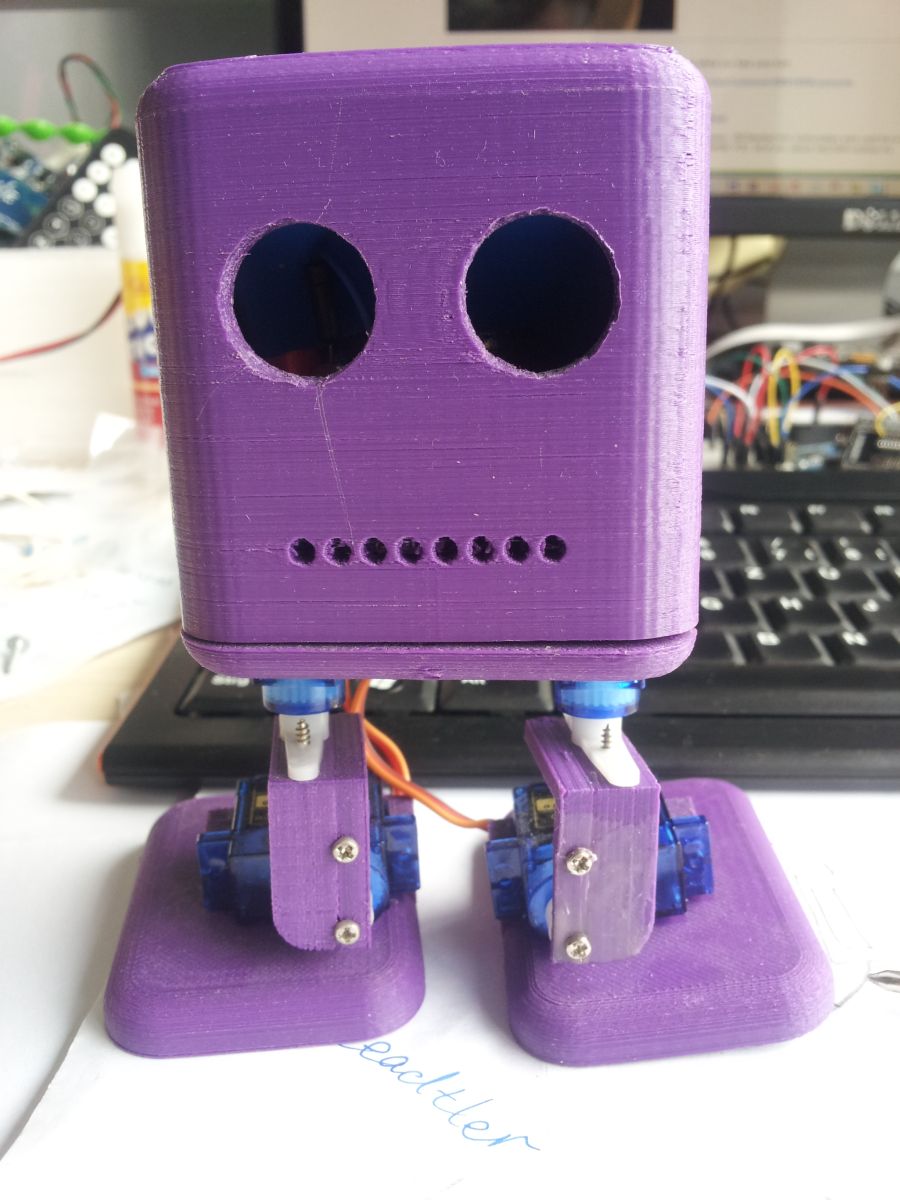
As I discovered "Bob" I had purple filament in my office 3D printer. Well, i thought it would not make it to the robot section since I am not having enough time to finish it.
Seeing the Blue Bob and the Yellow Bob drove me to publish it.
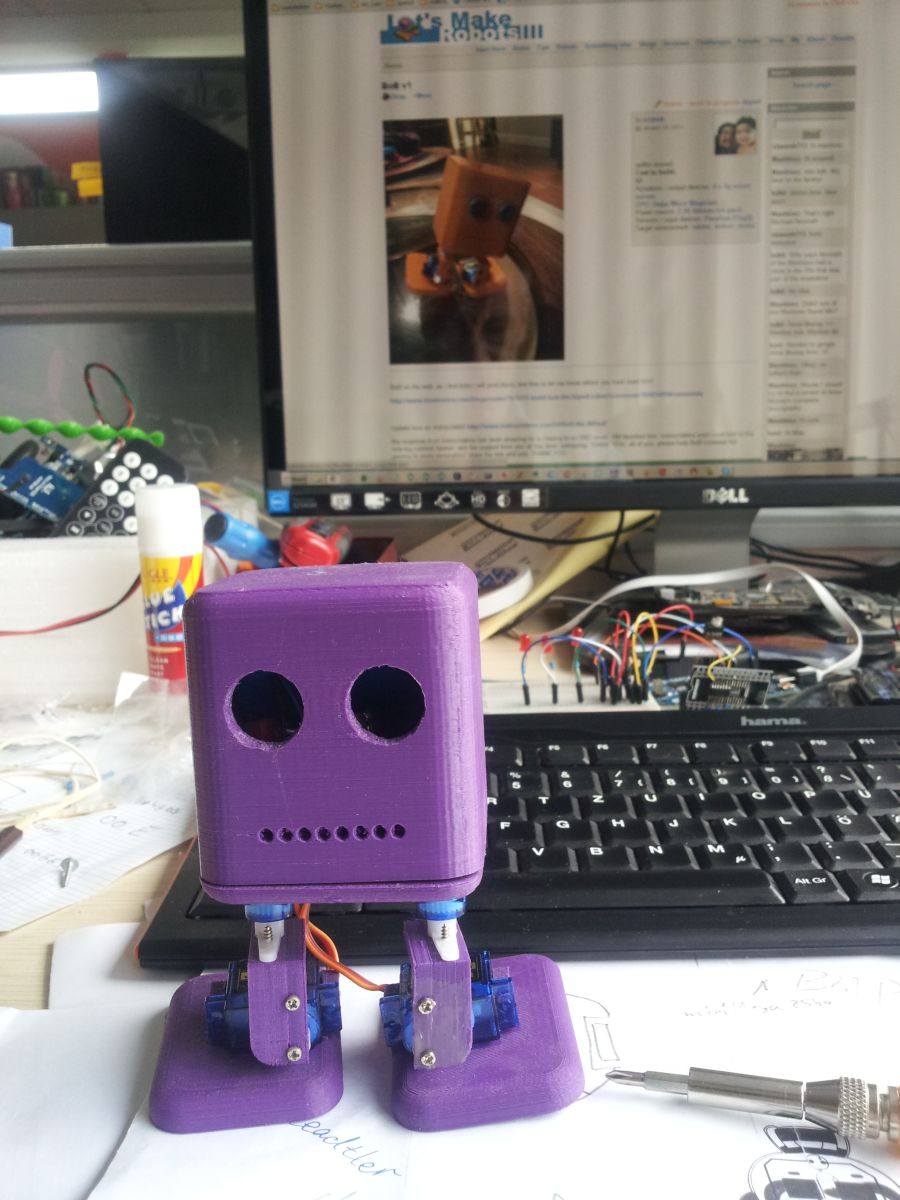
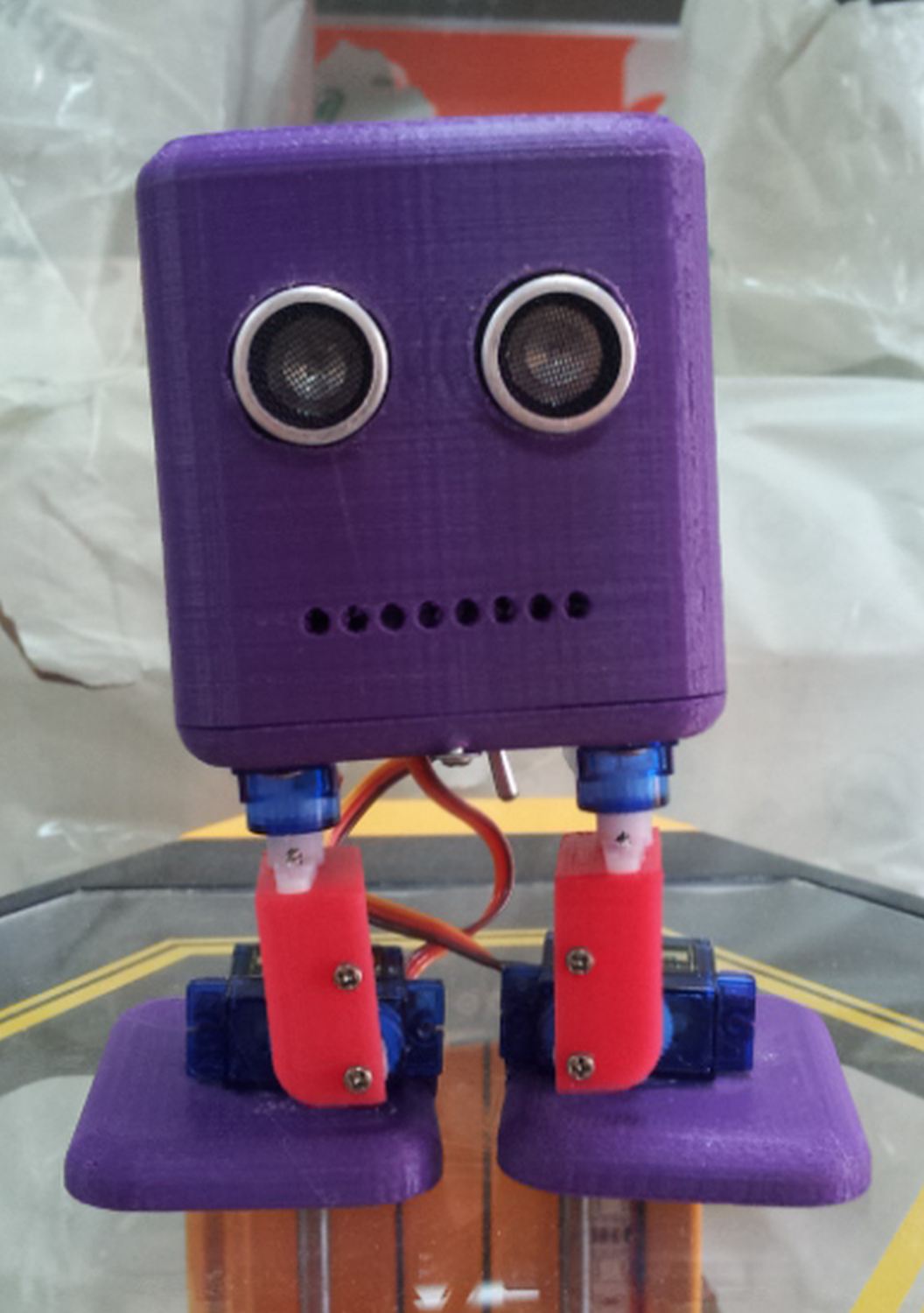
As you can see, my Bob is quite not done. I still not put a sensor in it since I just wanted to see it walking LOL
Never mind, I guess Bob is sexy also without the sensor, also if his face is missing something without it.
The print was ok with the first try. I printed with 50% filling but wished to do the both servo brackets with 100%
Quick assembling with the servo screws. See the right bracket was already broken and fixed with 2 component rubber glue.

Funny that the switch is also on the position as I saw in the other Bob
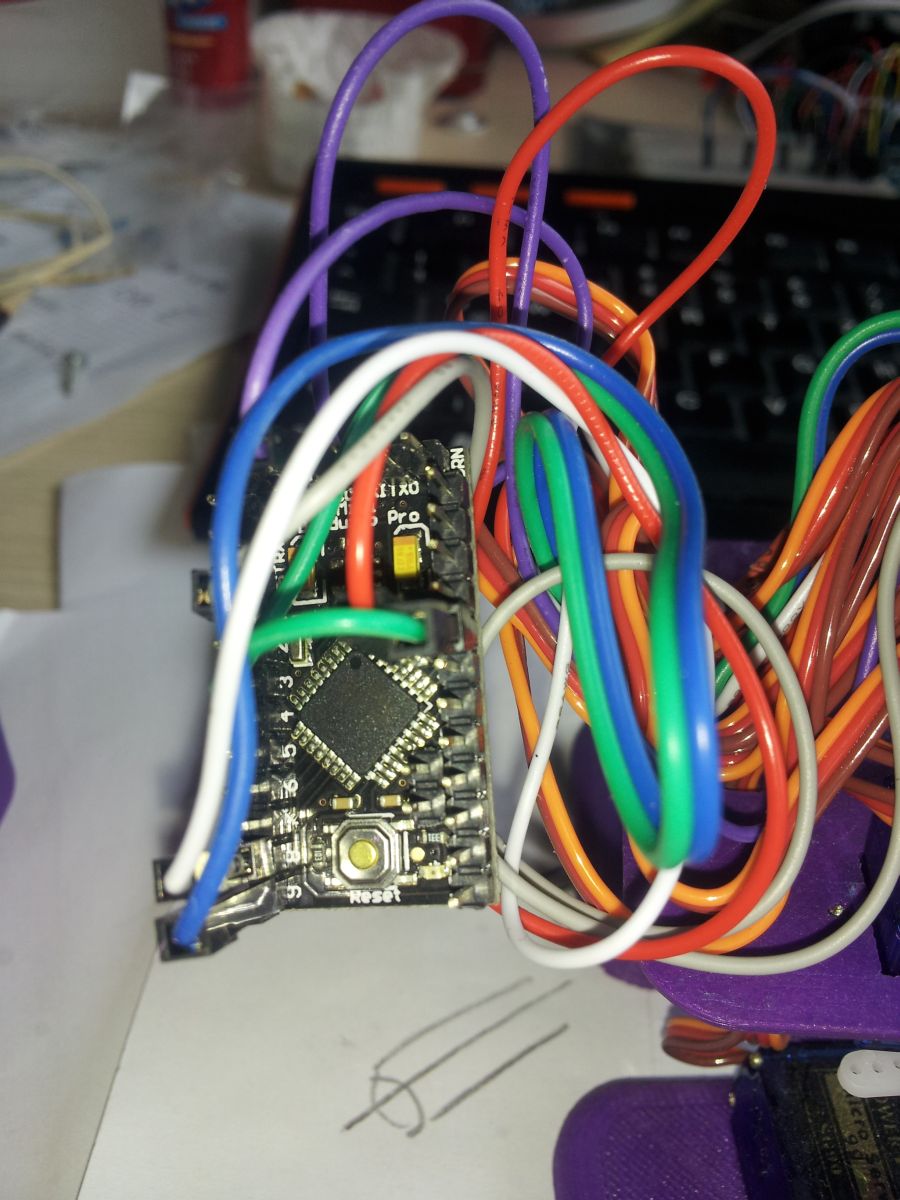
Bob's brain is a DFRobot Arduino Mini Pro...
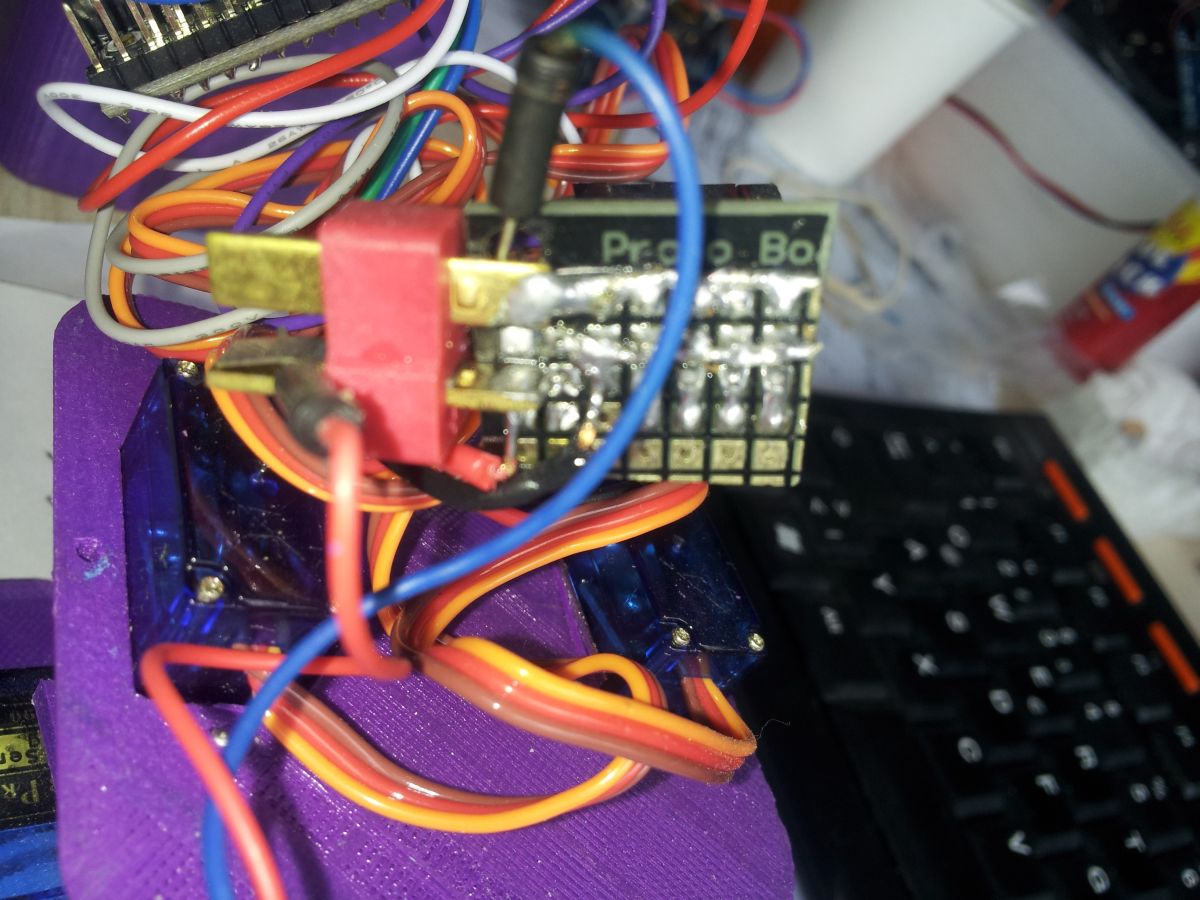
...with a DIY servo shield...and charging plug (yes, beat me but I did not have another (smaller) one :-) )
Driven by a LiPo but still not very stable in walking. The center of gravity is still to high in my Bob.
I will not mark it as finished because I am still confident to add a sensor on it and give it a modified programming.
But for now I will stop here and point you to the original and the blue and yellow Bob page (see links above) to learn more. Video will come later tonight. Video is online but I never get the aspect ratio right in that Youku player...Youtube is still processing since last night...76MB video...seems there is something jammed...
EDIT: Will try Protowrxs code to make him more stable: https://www.robotshop.com/letsmakerobots/node/35877
UPDATE: Youtube video is online and it's at 50% slow motion :-)
UPDATE: I finished BoB during the campus party in London. I've uploaded the code of FrankenBob. Sadly, he broke his legs on the way back to China, so I printed him two new legs, only that the color is not matching with his teint. Anyway, now he'll be packed and shown at the Maker CarnivalShanghai. Marked as finished, Purple BoB is done!!!
Just walking
- Actuators / output devices: 4x Micro Servo Tower Pro
- Control method: autonomous, arduinio
- CPU: Arduino Mini Pro (Atmega 328)
- Operating system: Arduino IDE
- Power source: 1x LiPo 3.7V; 2000mAh
- Programming language: Arduino ide
- Sensors / input devices: none yet
- Target environment: indoor, desk, smooth and dry surface outdoors