



Pudding Bowl Special
Having taken a sabbatical from programming Big Chaser, I decided to do a ball bot.
 There are a pair of pudding bowls or mixing bowls attached directly onto a threaded bar. Also attached to this bar is a servo (modified for continuous rotation). When the servo is powered, it moves the bar, attempting to turn it and the pudding bowls.
There are a pair of pudding bowls or mixing bowls attached directly onto a threaded bar. Also attached to this bar is a servo (modified for continuous rotation). When the servo is powered, it moves the bar, attempting to turn it and the pudding bowls.
 Hanging from and perpendicular to this servo is an unmodified servo, attached to which is the battery and the control. When this second servo moves, it swings the battery etc (the "weight") to either side, causing the ball to steer.
Hanging from and perpendicular to this servo is an unmodified servo, attached to which is the battery and the control. When this second servo moves, it swings the battery etc (the "weight") to either side, causing the ball to steer.
 When the main servo is powered, it causes the battery to attempt to "rotate" around the bar, which it cannot do, so the ball rolls forward.
When the main servo is powered, it causes the battery to attempt to "rotate" around the bar, which it cannot do, so the ball rolls forward.
 When the microcontroller detects a current over a certain amount, it assumes the ball has hit an obstacle and attempts a three-point-turn.
When the microcontroller detects a current over a certain amount, it assumes the ball has hit an obstacle and attempts a three-point-turn.
 Yes, clearly the device is not yet under microprocessor control. In fact, you can hear me twanging the radio control joysticks in the background, but what's written here is a goal.
Yes, clearly the device is not yet under microprocessor control. In fact, you can hear me twanging the radio control joysticks in the background, but what's written here is a goal.
I wanted the "ball" to be as near spherical as possible so I cut the rims off the bowls. Of course this was what had given them their strength. After several attempts, I came up with the idea of making interlocking teeth on the edges of the bowls and that's what I'm trying next.
This is a bunch of photos and videos of the gubbins being assembled and working. I don't know if I'll do much more with it, now. I've sort of demonstrated the principle.
18-Oct-2009
I'm getting all fired up about the mark II. Look what my wife decided to throw out:
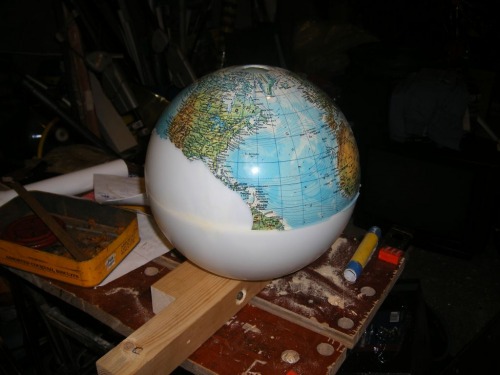

That's gonna be far more managable than the two pudding bowls!!
Rolls about under microprocessor control. Avoids obstacles.
- Actuators / output devices: Acoms R/C Servos
- Control method: Autonomous.
- CPU: Microchip PIC 16F628
- Power source: 4x AA 1.5V cells
- Programming language: Microchip RISC
- Sensors / input devices: None. Current sense only.
- Target environment: Smooth-ish ground.