


ProjectBOX
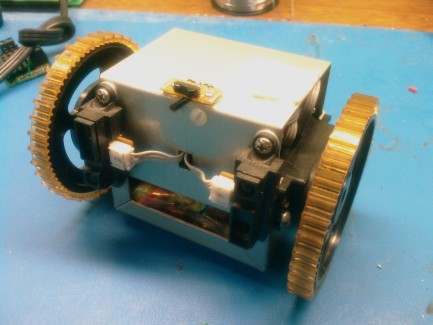
This is a small rover I built one day when I was bored at school. I picked up a small square project box and thought, "This would make a good carpet rover", and the rest is history. The wheels, made to mate with the non-stamdard HiTec servo splines are from Lynxmotion and the treads around them are a custom urethane molded part from the Omnitread robot that I helped to design and build as part of the Mobile Robotics Lab at UMich.
Navigates via IR and plays other random behaviors (navigate, wall follow, beacon follow, beep, spin, go crazy)
- Actuators / output devices: 2 x HiTec Servos modiefied for continuous rotation
- Control method: autonomous
- CPU: Handy Cricket (PIC Based)
- Power source: 5 x 1.2V NiMH AA Cells
- Programming language: Logo
- Sensors / input devices: Sharp GP2D120 IR sensor x 2
- Target environment: Indoors - Carpet