


Project Ping Pong
This is my first folly into the world of robotics, Project Ping Pong - which is a different take on the locomotion of the biped robot.
I have analysed the various biped designs of the robots here at LMR (great work everyone, some really nice projects going round!), and have thought up my own variation of the mechanics behind the joints to make the legs move (and oneday the arms too). Would love everyone's opinion / suggestions.
Basically this is what I see as the problem with the 'typical' biped designs that are constructed at the moment, that each joint of the leg (hip, knee, ankle), are connected with a 2 dimensional movement of a servo (the X axis movement of the rotating arm of the servo). The hip and the ankle on the human body are not like this, they move along the X and Y axis in the ball joints. This makes for a 'natural' walking movement that is much more flexible and smooth (I believe).
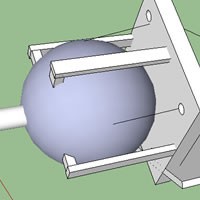
To try and copy these motions, I am constructing and testing a ball bearing joint - made of a ping pong ball. 4 strings will connect the 2 planes of the X and Y axis movements of 2 servos positioned at 90 degrees from each other, and will pull on the sides of the ping pong ball, which will move the joint around 360 degrees of movement. Here is a quick Google Sketchup of my planned test rig:
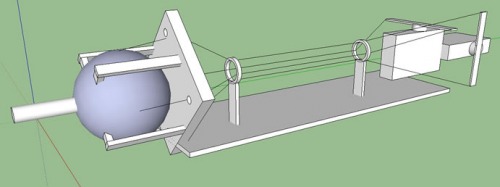
Explaination from left to right. Piece of dowl will hold the 'thigh' to the 'hip' joint, made of a ping pong ball. The ping pong ball is held in by a ball bearing joint style connection. 4 strings of fishing line will connect to each 4 'sides' of the ping pong ball and feed back through the board below. Each string will connect to one of the sides of the servo arms - horizontal to the first, and vertical to the back. This should allow for the movement of the 'thigh' to be controlled and able to move beyond the typical servo/joint connection.
Would love some feedback on this experiement. I have constructed the ping pong joint, and am up to connecting the strings up to the servos (once time permits!).
UPDATE
The build is complete for this experiement. Link to the youtube video here.
As you can see in the video - I have not put in the ring systems that I thought would be necessary. Drilling the holes closer to the centre of the ball where it touches the back plate did the same trick, and also added much greater accuracy with the movement of the sides of the ball.
The first sequence that is run on the servos moves the centre hole to the top, bottom, left, right, top right, centre. The sequence then changes towards the end of the video with a 'running' action of top, bottom, repeat.
Again, would love some feedback from the users here on my little experiement.
FR.