



Project ABE - XMOS Challenge
- Summary -
More information within the weekend...

About Project ABE
The main purpose of the project it's to create an autonomus vehicle to explore lakes and reefs. Aquatic Bot Explorer (ABE) its based on a ROV (Remotely Operated underwater Vehicles ) and AUV (Autonomus Underwater Vehicles ) class robots.
This bot it's powered by an XK-1 processor by XMOS, several boards for sensing: pressure, temperature, depth, etc. Motor control, demux, ADC, etc. are developed.
1.1 Vehicle Design
ABE design consist of three DC motors with special water proof. The control system uses a Fuzzy algorithm for underwater stability, sensed by an accelerometer. three underwater proof servos are used to move each thrusters for different movements. An illuminated system will be controlled by a light sensor, according to the ambient light. Other measures to consider are: temperature, pressure and water presence inside the bot, in this case will activated an special function to go back to the surface. In figure 1.1.1 its show the 3D model of ABE. The version 5 of ABE it is almost finished and under testing.
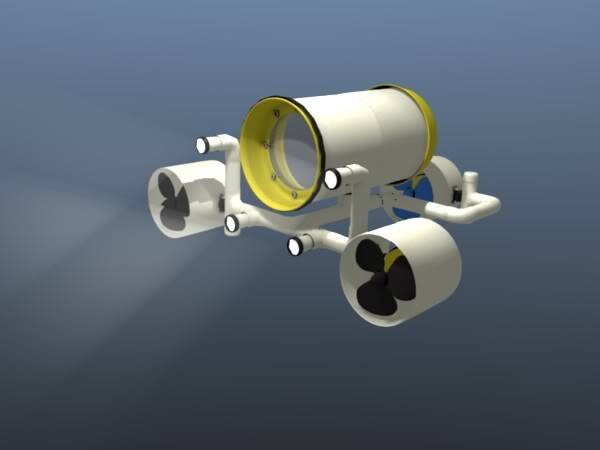
Fig. 1.1.1 - ABE 3D design.
In the Video shows the process of assembling ABE, this version uses a minimum of parts for ABE version 5.
2.1 Circuit Design
The circuits used in ABE are several boards divided in two main areas: control and sensing. Each board contains the basic circuits to move the bot and obtain vital information from the enviroment. This boards are conected to the XK-1 (Figure 2.1.1) The control board wich is used for the motors are in pins XD12 - XD23. The sensor and lighting control are in pins XD0 - XD11.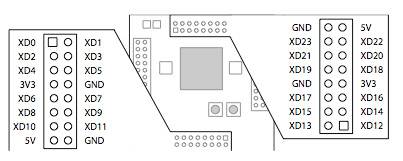
Fig. 2.1.1 - XK-1 pins locations to use for control and sensing boards.
All the boards are put together in cube arrangement that contains: main sensor board, control board, XK-1 and power board. This is ilustrated in figure 2.1.2.
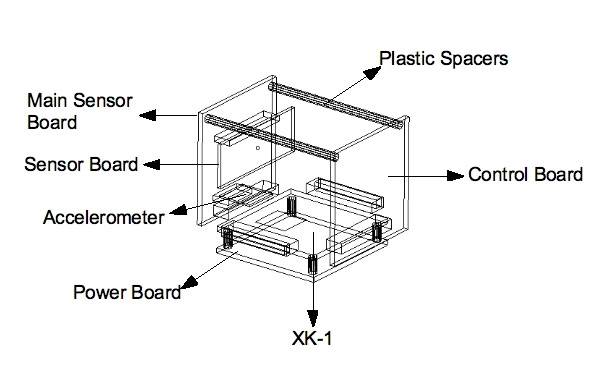
Fig. 2.1.2 - PCB Arragement for X-BOX.
Power Board - The PCB uses 7805, 7809 to obtain 5, 9 Volts,output reference voltages and a small DC-DC converter.
Sensor Board - This PCB uses a LM35 for temperature sensing, a basic water precense sensor and a small power circuit to activate the lighting system and an accelerometer for position control sensor.
Main Sensor Board - The main use of this board, its to obtain analog data from the sensor to the XK-1, according to x-linkers[*] ,there is available code for MCP3208 , this 12-bit SAR ADC from MicroChip has 8 input pins, multiplexed to a 100 ksps ADC. The board will use one of this IC, with an 4017 to multiplex ports to use for control purposes.
Control Board - This board will take the signals from the XK-1 to control 4 DC motors and up to 9 servos. To achive this task, its use an 74hc595 to send signals control for two L293D. Also, a 4017 will multiplex the signal for the servos.
3 Algorithms Design
3.1 Basic Servo Control
Soon ..
3.2 Basic PWM - DC Motor Control
Soon..
4 Simulation and Testing
4.1 - Trhuster Test
Soon ...
underwater exploration for lakes and reefs
- Control method: Autonomous.
- CPU: xk-1